
CSIG图像图形技术挑战赛激光SLAM挑战环境下建图竞赛
主办方: 中国图象图形学学会(CSIG)
承办方:北京数字绿土科技股份有限公司
目的与意义
在智能导航技术浪潮的推动下,激光SLAM技术凭借其高精度、高效率的特点,成为机器人与自动驾驶、高精度地图、测绘、林业等领域的核心技术。为汇聚顶尖技术团队,共同探索技术的前沿应用,挑战技术极限,我们将举办“激光SLAM挑战环境下建图竞赛”。
通过竞赛的形式,我们鼓励参赛者们深入研究、不断优化算法,提高激光SLAM在复杂环境中的定位精度和地图构建效率。这不仅是对技术能力的考验,更是对未来智能导航定位、高精度测绘、高精度地图、林业调查等领域发展的积极探索。
如果您对上述挑战赛感兴趣,可以通过下方的二维码或链接登记报名。在报名过程中有任何问题,请联系下方挑战赛联系人。
参赛要求
全国企事业单位、高校的师生及团队、个人均可参赛(团队人员不超过五人)
参赛对象
专注于视频领域AI智能应用、视频图像处理、机器学习等研究的国内高校、企业及科研院所的专业人才。
竞赛网站
https://www.lidar360.com/archives/portfolio/lidar-competition
线上挑战赛阶段
注册报名:2024/6/1——2024/7/1
登记注册信息
数据集发布:2024/5/31
包含3个场景的数据集
1.林业环境
2.多层环境
3.弱GNSS环境下,道路往返
下载地址:https://pan.baidu.com/s/1fYNNlGzt3_J58CGisGUh1A
提取码:5v1w
结果提交:2024/6/15——2024/7/10
*主要考虑系统的成图精度
*需提交算法在测试集上的处理时间、SLAM轨迹、点云结果。
*需提交可执行程序和源代码
*需提交一份对于系统的简要概述,不超过两页。
*排名前4的队伍将会被邀请参加复赛。
线下答辩阶段
入围通知:2024/7/15-2024/7/20
报告所需材料另行通知
现场报告:2024/8/3(暂定)
奖项设置
一等10000元、二等6000元、三等4000元
提交格式和评估标准
6 DoF姿态文件格式需与示例保持统一。
SLAM系统的整体性能评估标准请参考竞赛网站发布的详细信息。
要求
1.硬件要求
- 要求您的算法最低应当可以在配有intel-i7 CPU,内存不大于32GB和简单NVIDIA GPU的基准PC上实时运行。
2.评价指标
- 林业环境:① 点云无分层;② 树干无错位;③ 相对精度(我方有检核点);④ 成图效率
- 多层环境:① 点云无分层;② 多层之间平行度和垂直度;③ 多层之间无侵蚀现象,层高正确;④ 点云厚度;⑤ 成图效率
- 道路环境:① 点云无分层;② 道路的水平度,建筑垂直度;③ 绝对精度(我方有检核点)和重复精度;④ 点云厚度;⑤ 成图效率
指标说明:
- 相对精度:根据我方提前布设的多个具有明显强度反射的检核点,量测点云距离与我方提供的真实距离进行比较;
- 成图效率:从开始运行到程序结束得到最终点云的时间;
- 分层:重复扫描处点云无明显的错位现象;
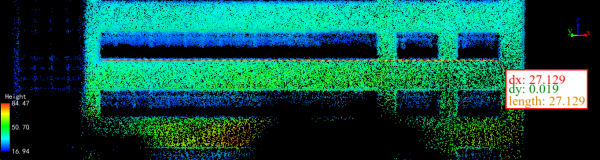
- 平行度:建筑的立面和楼层都是平行的,计算公式如下:
atan(△h/D):△h:量测两端高差 D:量测的距离
如下图所示,计算平行度为:atan(0.019/27.129)=0.029°
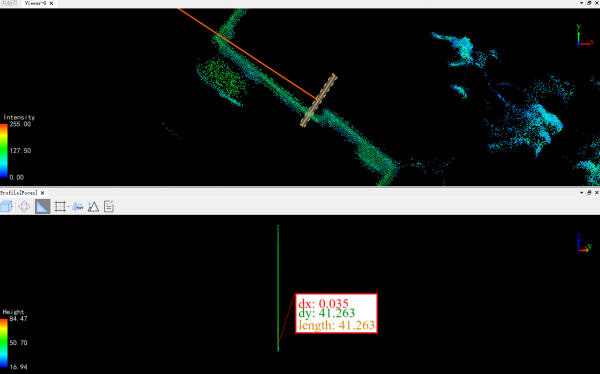
atan(△h/D):△h:量测两端高差 D:量测的距离
如下图所示,计算垂直度为:atan(0.035/41.263)=0.049°
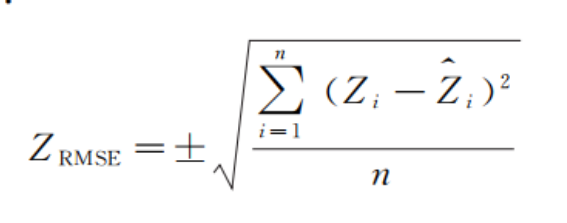
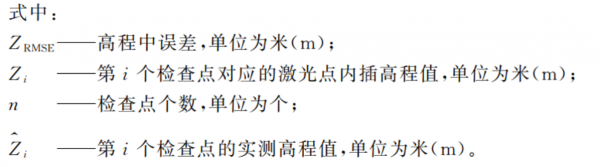
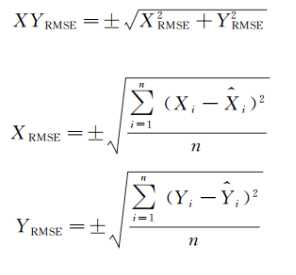
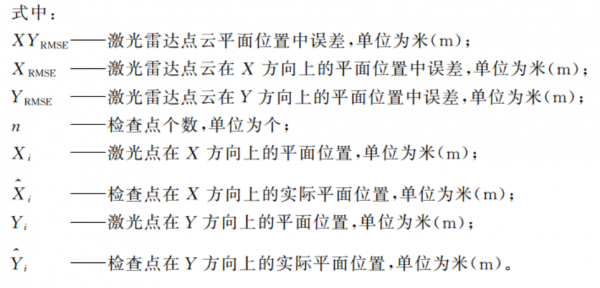
6.绝对精度:分为平面中误差和高程中误差。根据我方提供的具有明显反射率的检核点进行中误差计算。
高程中误差![]() 计算公式如下:
计算公式如下:
平面中误差![]() 的计算公式如下:
的计算公式如下:
7.重复精度:道路场景的往返数据的叠加,观察2个数据从轨迹中心逐渐偏移到距离轨迹40米远处的点云分层情况。
8.点云厚度:剖面设置为0.1米,量测道路和建筑至少10处位置的点云厚度;
挑战赛联系人
参赛事宜咨询:刘丹 13260206390;技术咨询:曾滔 zengtao@lidar360.com
报名链接
https://lidar360.mike-x.com/ErXES
