
1 传统巡检方法
1.1 人工巡检
操作流程:
巡检人员人工拿着望远镜进行查看巡检。
不足之处:
巡检效率很低,成果不具备留档留存条件。
1.2 手动操控无人机巡检
操作流程:
巡检人员手动操控无人机进行操控飞行拍照。
不足之处:
对飞手的专业素质要求很高,控制难度极高很容易炸机(需同时兼顾前行、随线上下调节、离电力线距离以及拍摄角度等复杂操作),巡检过程及成果因人而异,巡检成果不具备标准化,且效率不高。
1.3 根据激光点云进行航线规划后自主巡检
操作流程:
先进行激光点云数据的采集,然后进行数据切档分类处理,然后进行导地线巡检航线规划,最后根据航线进行自主飞行拍照。
不足之处:
前期流程比较多,且成本比较高;然后航线不具备普适性,由于点云扫描的季节性不同弧垂不一样,航线不具备覆盖全年导地线的状态进行巡检飞行。
2 LiAir X4侧方自主飞行巡检解决方案
2.1 设备简介
 图 LiAir X4自主飞行激光雷达采集系统(有侧方自主仿线功能)
图 LiAir X4自主飞行激光雷达采集系统(有侧方自主仿线功能)
LiAirX4 是数字绿土研发的新一代自主飞行激光雷达采集系统,集成轻小型 32 线激光雷达、高精度惯导、高分辨率测绘相机以及高算力边缘计算平台。旋转式激光雷达设计带来点云全向扫描的能力,基于自研的 AirPilot 自主飞行算法,设备可实现场景障碍物感知自主避障飞行,不仅提升了作业效率和安全性,而且还降低了人力成本,是未来智能巡检的重要工具。。
2.2 操作流程
1、设备安装
将LiAir X4和H20T设备同时挂载到M300/M350飞机上,同时飞控端安装我司自主研发的自主仿线飞行控制APP软件LiPlan。
 图 LiAir X4与H20T双挂载
图 LiAir X4与H20T双挂载
2、仿线设置与飞行
手动控制飞机飞到电力塔附近,打开飞行控制软件liplan进行仿线相关参数设置:
(1)距离导地线垂直与水平距离、飞行速度、飞行方式(档间模式、过塔模式)等的设置;
(2)进行H20T拍摄角度、变焦参数、曝光参数等的设置;
(3)点击仿线按钮启动仿线后按照参数设置自动锁定导地线后进行线路选择后进行自主仿线飞行,飞行过程中无需手动操控无人机,也无需提前规划航线。
2.3 飞行成果
LiAir X4激光雷达设备侧方自主识别锁定导地线进行侧边沿线飞行,同时H20T自动对着导地线进行自动拍照,获取导地线可见光与热红外成果。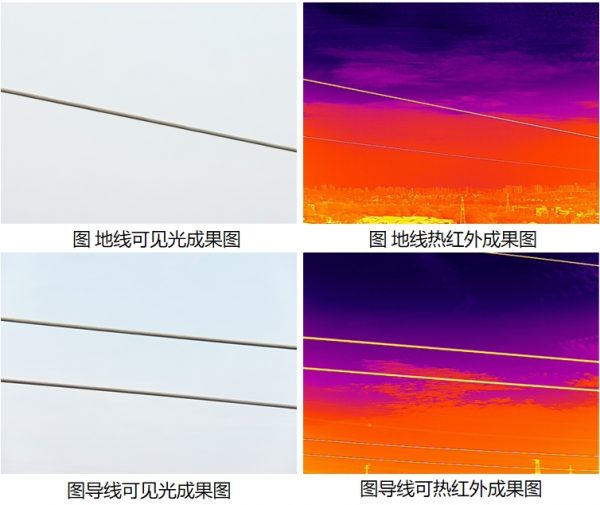
2.4优势
1、无需手动操作以及提前规划巡检航线,优化流程、解放飞手,可沿导地线侧上方、侧下方、平视视角等多角度自主识别锁定导地线进行仿线飞行巡检,稳定性很高,对导地线散股、线上漂浮物、线下树障放电灼烧点等隐患进行巡检拍照;
2、可实现档间自动换相功能,沿地线仿线飞完可自动掉头下降换相接着自动仿导线进行自动飞行,无需手动操作,操作友好,效率高;
3、可实现单回线路的中相的拍摄,锁定边相导线侧上/下方飞行,H20对准中相拍摄;
4、一次飞行多种规格成果数据获取,可见光、热红外照片成果以及激光点云数据。