
LiHawk是基于垂直起降固定翼无人机的长距离激光雷达扫描系统,集成激光雷达传感器、组合导航系统和全画幅相机,同时采集激光雷达点云数据和影像数据。搭配系统控制及预处理软件LiAcquire和数据后处理软件LiDAR360,为用户提供免基站功能、数据采集、组合导航系统数据解算、点云快速生成、数据显示、数据分析与处理完整的一体化解决方案,可用于电力巡线、林业调查、地形测绘等领域。
产品特点
- 高度集成
集成激光雷达传感器、组合导航系统和全画幅相机,测量精度高,实时监控系统状态,远程参数配置,保障数据完整采集。
- 纯电动垂直起降固定翼
无场地要求,全自主自检,自动航线飞行。电机驱动,易于维护,适用不同环境,无需因环境变化对油动发动机进行日常维护,双副翼结构设计,安全性更高。
- 一键点云生产
集成无基准站功能、组合导航数据解算模块、原始点云和真彩色点云生成功能,一键完成点云生产。
- 无基准站模式
无需外业进行基站架设,内置全国高精度CROS基站联网数据,作业范围和数据精度不受测区大小限制。
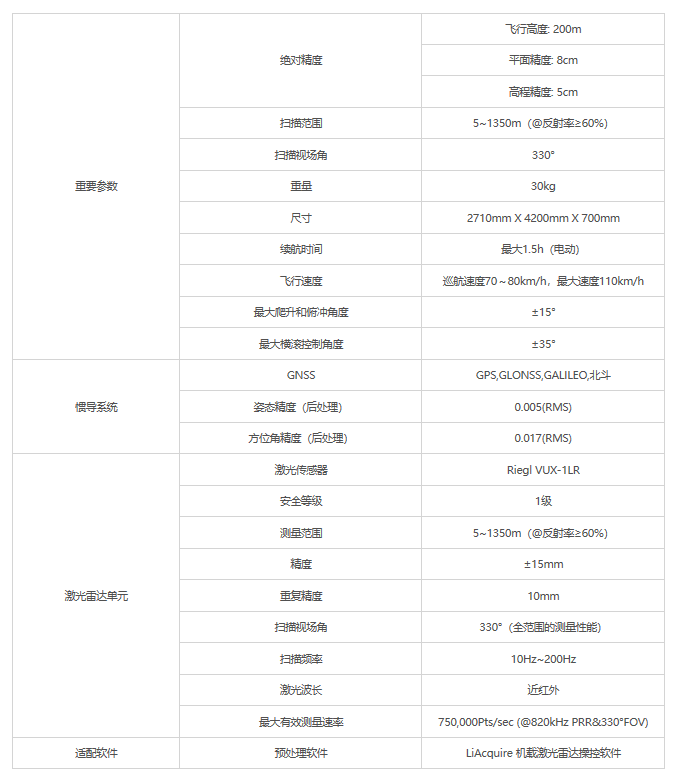
技术参数
应用案例
(1)任务概况
受业主委托,我司利用LiHawk垂起固定翼激光雷达系统对广东10平方公里的区域进行扫描,获取地物三维激光点云数据,点云精度满足国家1:500比例尺地形图测绘要求,点密度不少于20点/平方米。
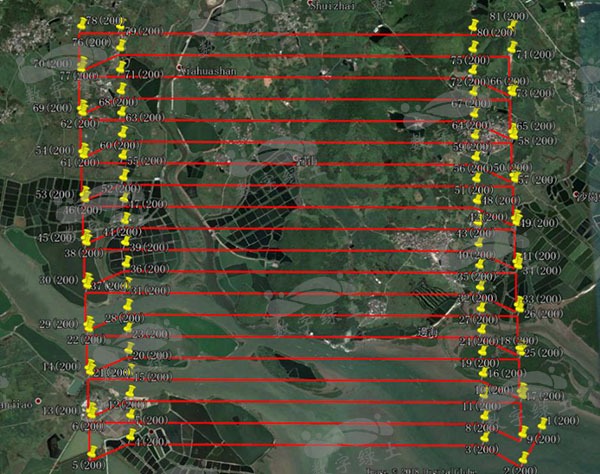
(2)数据采集
测区为规则的长方形区域,地形平坦,高差110m。按照测区特点东西方向规划航线,共20条航线。根据成果比例尺精度要求,设计扫描参数如下:
- 飞行高度:250m
- 激光点频:600khz
- 航线间距:200m
- 巡航速度:80km/h
按照上述参数设置,可以保证点云密度大于16点/平方米,航线间点云重叠度50%。利用一天时间完成测区数据采集。

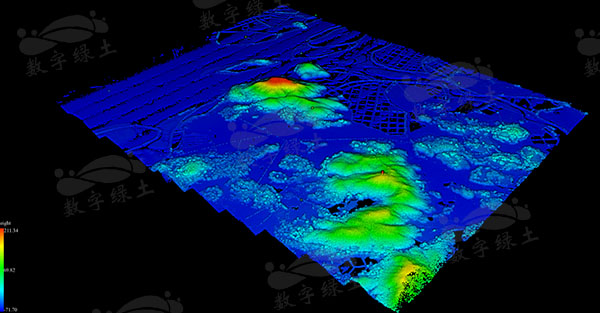
(3)数据成果展示
点云解算采用公司自主研发的控制及预处理软件LiAcquire。航带拼接,点云滤波等采用公司数据后处理软件LiDAR360。点云成果如下:
测区整体点云图
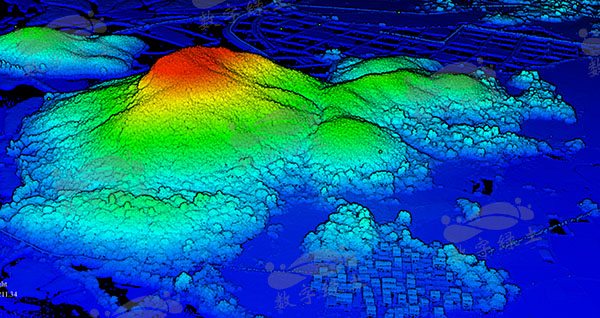
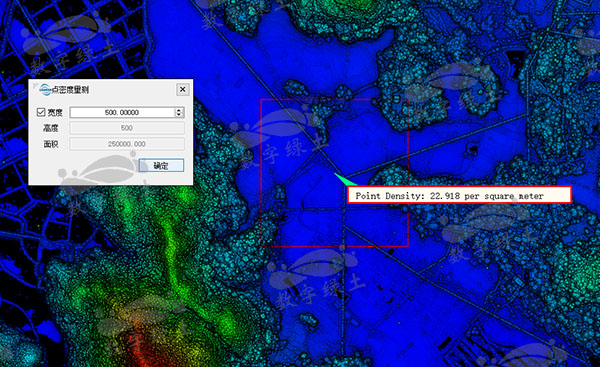
局部点云图
点云密度统计
(4)精度统计
按照客户要求,对点云的高程精度进行验证。

外业精度验证点
(6)有效高程精度验证点41个,精度统计如下:
| 点号 | X | Y | 控制点Z | 点云Z | 高差 |
| 1 | xxx 434.98 | xxx 8132.16 | -7.64 | -7.71 | -0.07 |
| 2 | xxx 460.19 | xxx 8188.19 | -7.55 | -7.62 | -0.07 |
| 3 | xxx 524.55 | xxx 9086.82 | 8.40 | 8.33 | -0.07 |
| 4 | xxx 089.37 | xxx 7298.33 | -9.15 | -9.22 | -0.07 |
| 5 | xxx 378.98 | xxx 7890.87 | -7.24 | -7.30 | -0.06 |
| …… | |||||
| 39 | xxx 645.92 | xxx 8240.32 | -2.07 | -2.17 | -0.10 |
| 40 | xxx 147.50 | xxx 7473.55 | -7.66 | -7.76 | -0.10 |
| 41 | xxx 508.55 | xxx 8366.60 | -7.60 | -7.70 | -0.10 |
| 中误差 | 0.079 | ||||
(6)项目总结
本项目采集的点云数据点密度大于20点/平方米,高程中误差为0.079m,完全满足1:500国家比例尺地形测绘要求,具有很高的精度。LiHawk单架次作业时间大于40分钟,相对于旋翼无人机激光雷达系统续航时间有很大的提升,作业效率高。LiHawk固定翼激光雷达系统以其续航时间长,数据精度高等优势必将在地形测绘,电力巡线等应用中发挥越来越大的作用。