
1. 简介:
随着激光雷达技术的发展,激光雷达现在可用于电力巡查。传统的巡查方式空间定位精度不高,难以精确判断线路走廊地物到线路距离,无法快速分类整理;而机载LiDAR测量系统可以更好地解决这些问题,从激光雷达数据中可以完整提取电力线点,并三维重建电力线走廊。电力线具有较强的延伸性,还能快速优化和维护收集到的信息,机载激光雷达技术还可以通过激光测量多次回波在一次测量时同时获取电力线、电力设施、植被、地表构造物的三维坐标,在数字地面模型和高分辨影像支持下,实现高效率、高精度巡线应用。
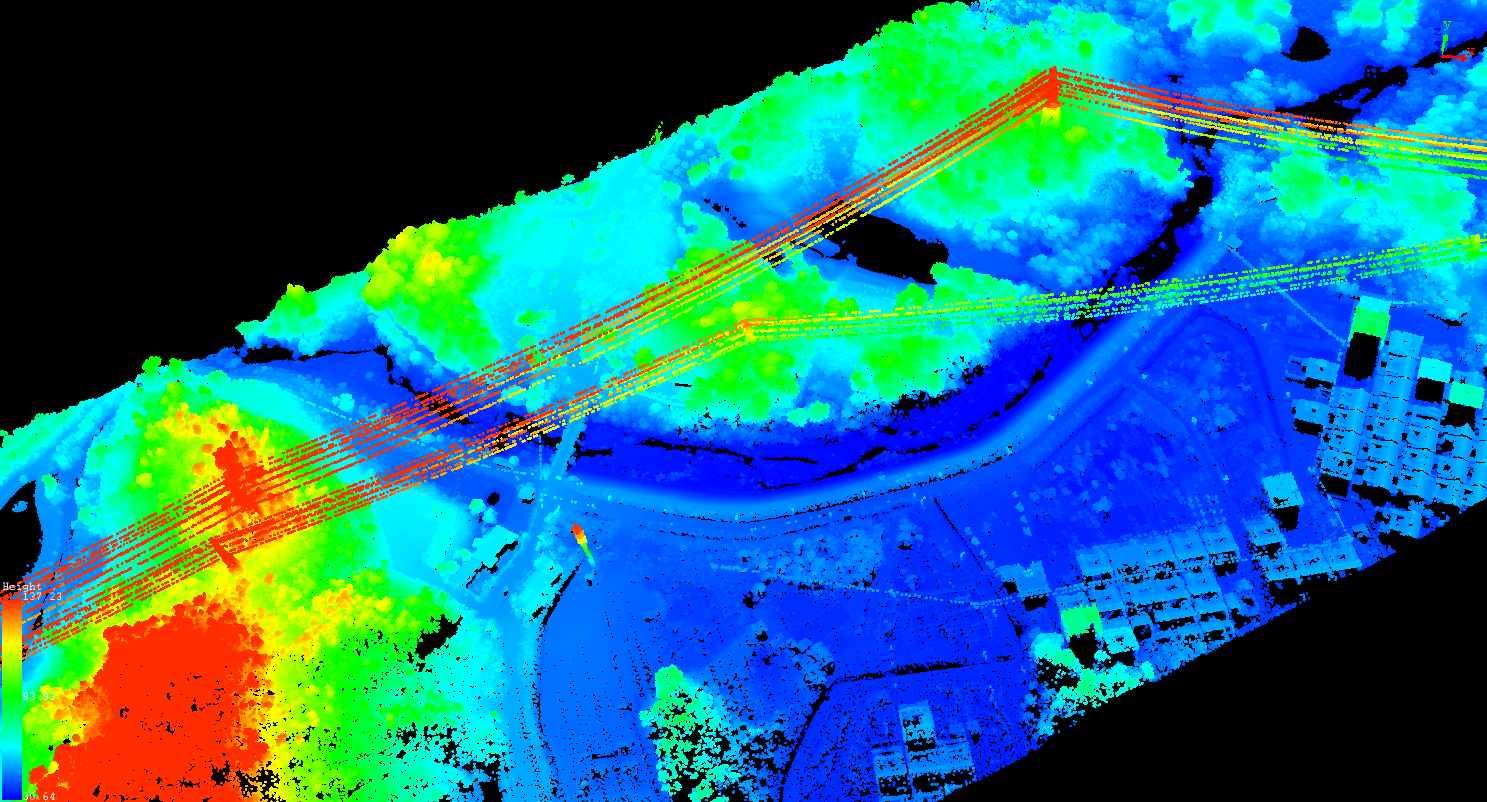
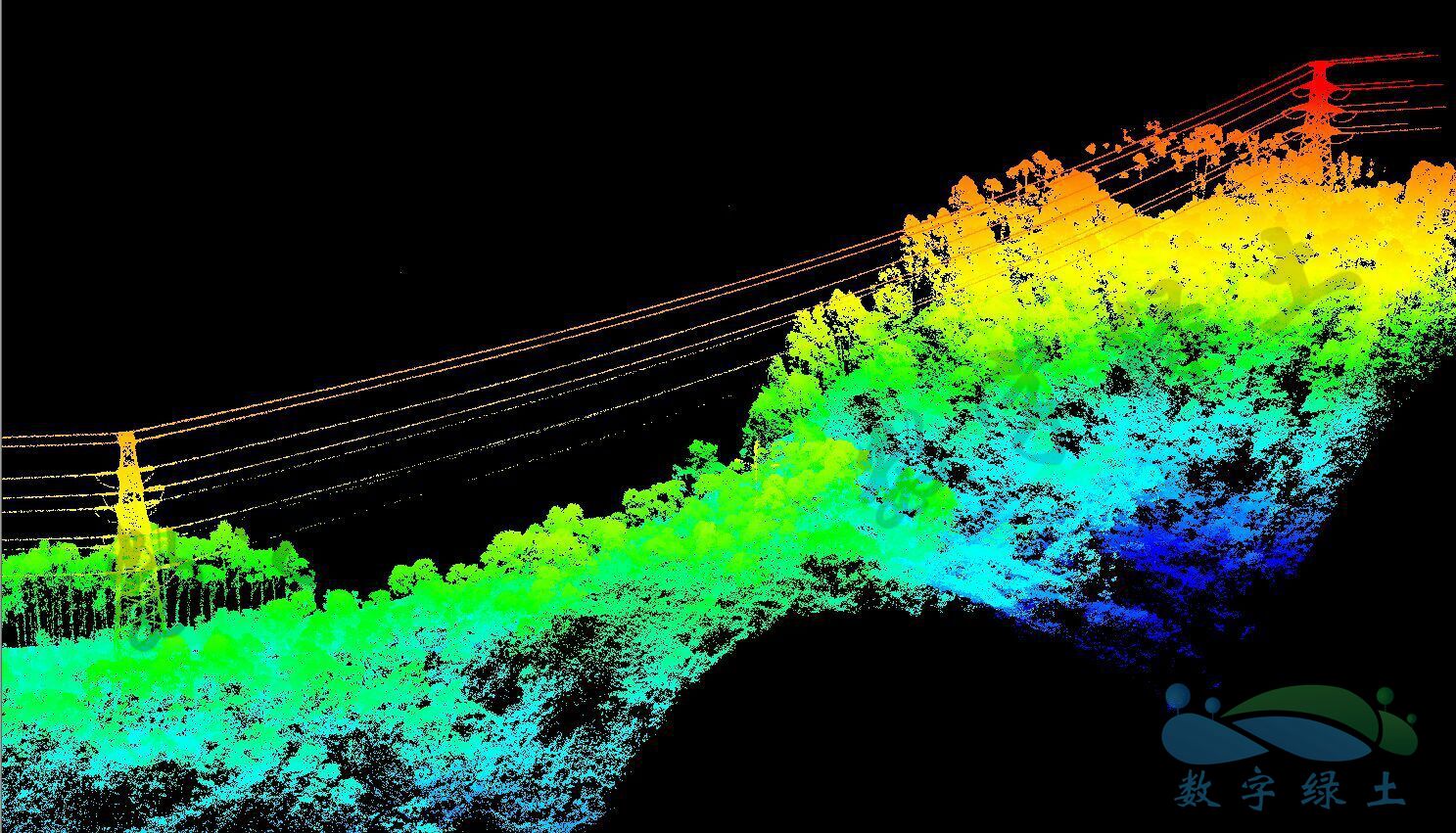
电力巡线点云数据
2.1 目标
电力巡线与风险排查
通过无人机激光雷达系统LiAir和数据处理系统为输电线路监护人员提供数据基础,发现输电线路设施设备异常和隐患, 以及线路走廊中被跨越物对线路的威胁。利用机载激光雷达测量系统获取的高精度点云可以检测建筑物、植被、交叉跨越等对线路的距离是否符合运行规范。
线路资产管理的数据基础
通过巡线采集的激光点云数据,处理成标准的DEM,结合分类后的点云可以实现电力线路的三维数字化,恢复电力线沿线地表形态、地表附着物(建筑、树木等),线路杆塔三维位置和模型等,并将线路的属性参数录入,成为实现线路资产管理的重要依据。
精密的激光雷达数据为电力巡线提供了坚实的基础
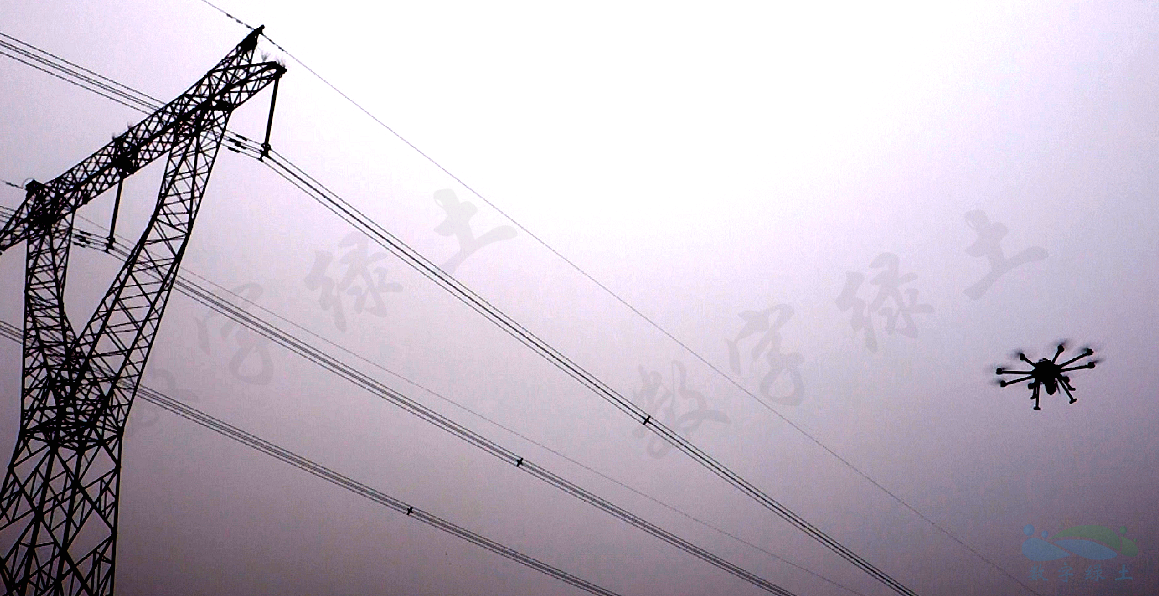
2.2 执行平台LiAir机载激光雷达系统
LiAir机载激光雷达系统是集全球定位系统、惯性导航系统、激光扫描系统的快速测量系统。它能够大面积、高分辨率、快速准确地获取地表各类地理信息,并且可以穿透地表植被,获取高精度地表点云数据、数字地面模型、数字表面模型(DSM)以及测区高程等数据成果。
2.3 采集过程
- 航线设计

- 数据采集
- 生成结果
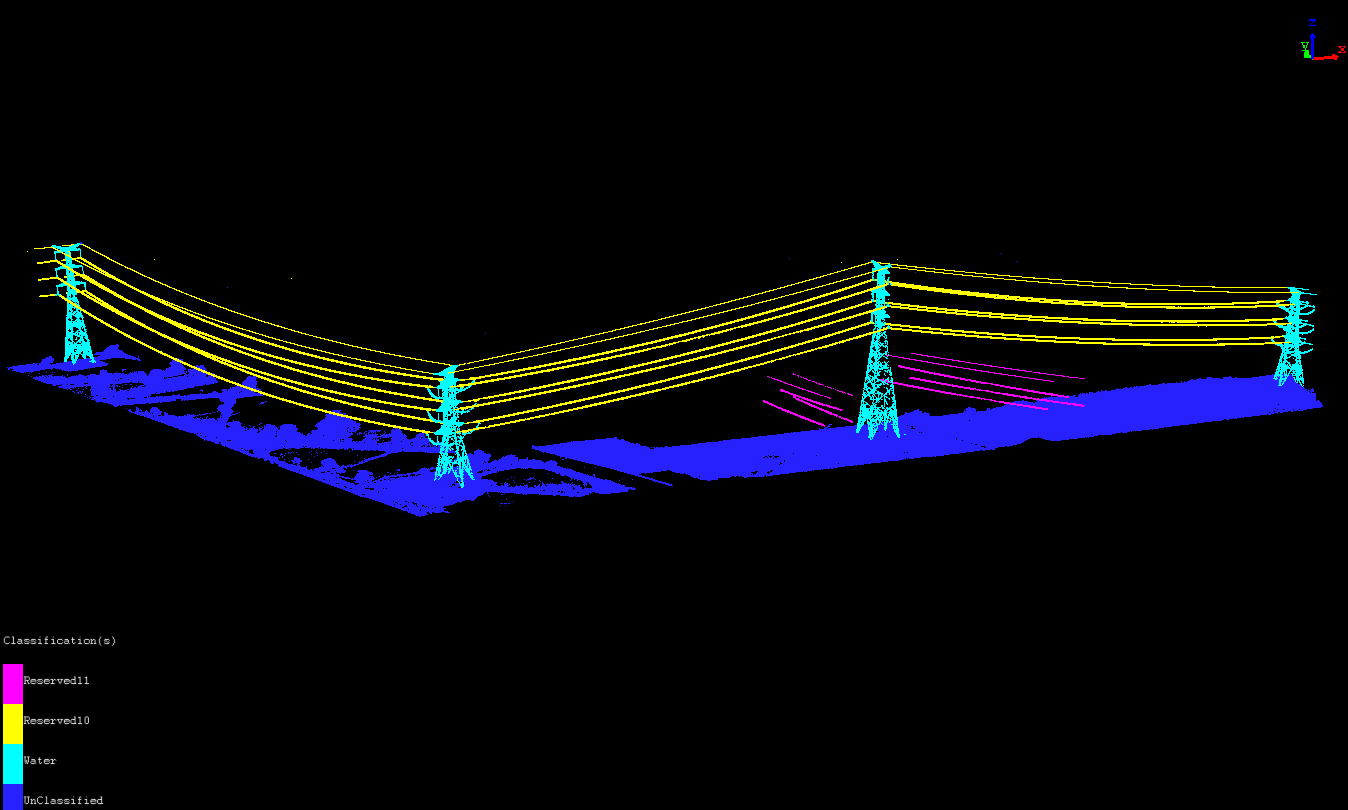
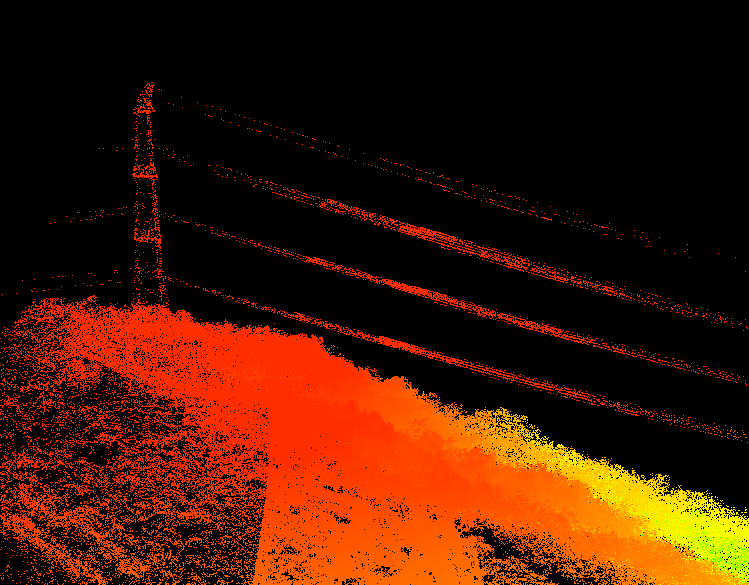
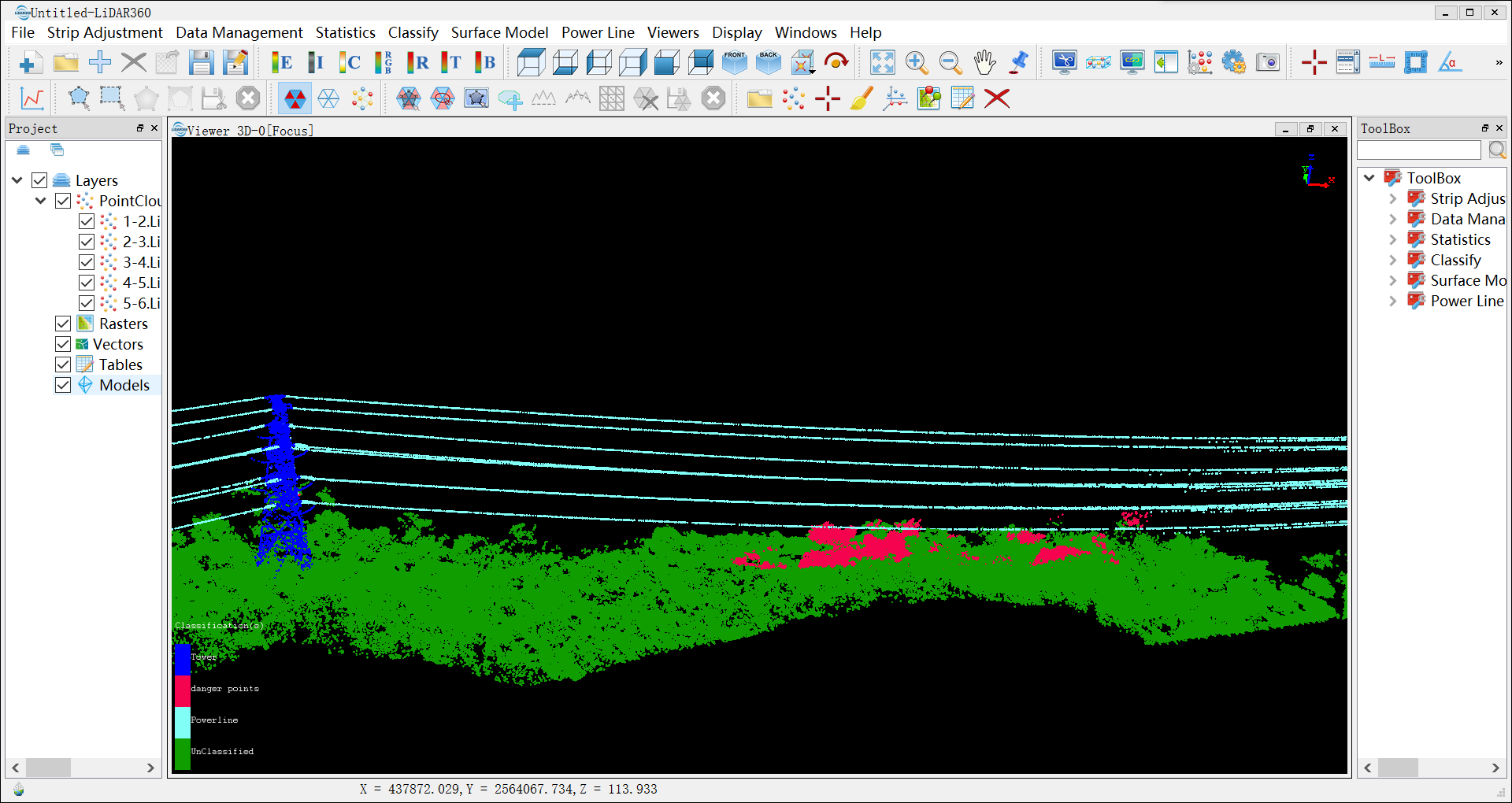
分类后的点云
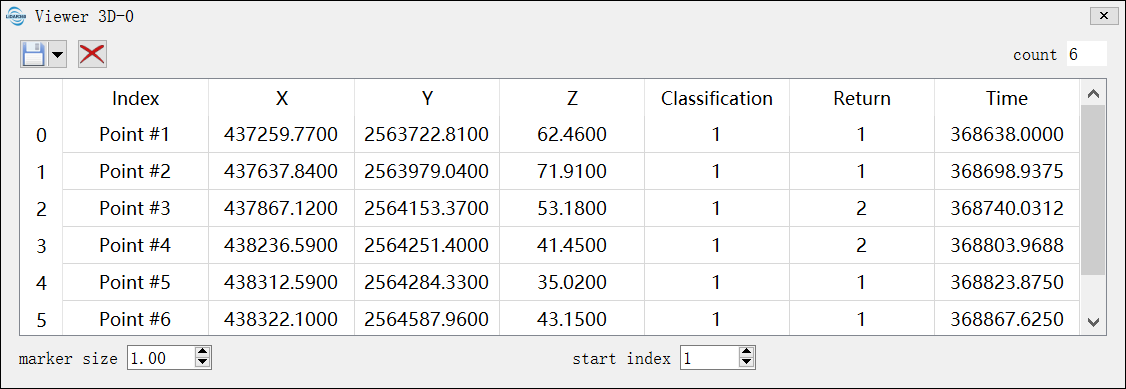
- 危险点检测
三维激光点云可视化平台中,以电力走廊内的关键对象—电力线与电力塔为核心,形成柱状探查空间,同时标识高大植被、高层建筑、穿越线路等关注地物,分析相互之间的拓扑关系与相互作用,从而提示危险排查区域。
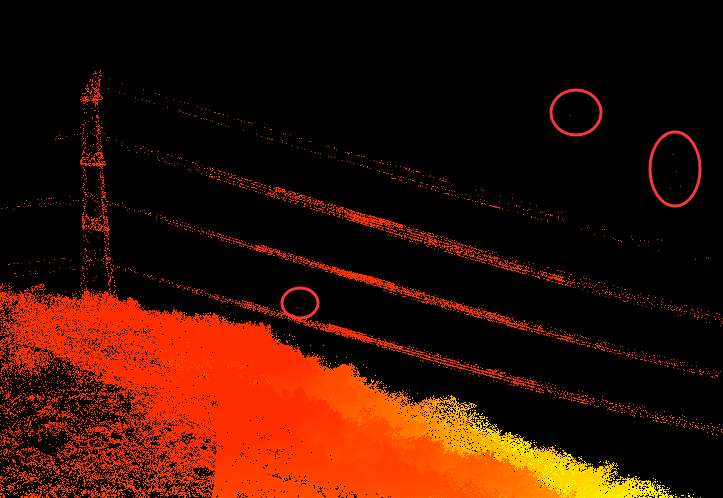
一键自动点云去噪,去除空中因灰尘、鸟类等引起的噪声点
从点云中提取杆塔信息,包括位置、塔高
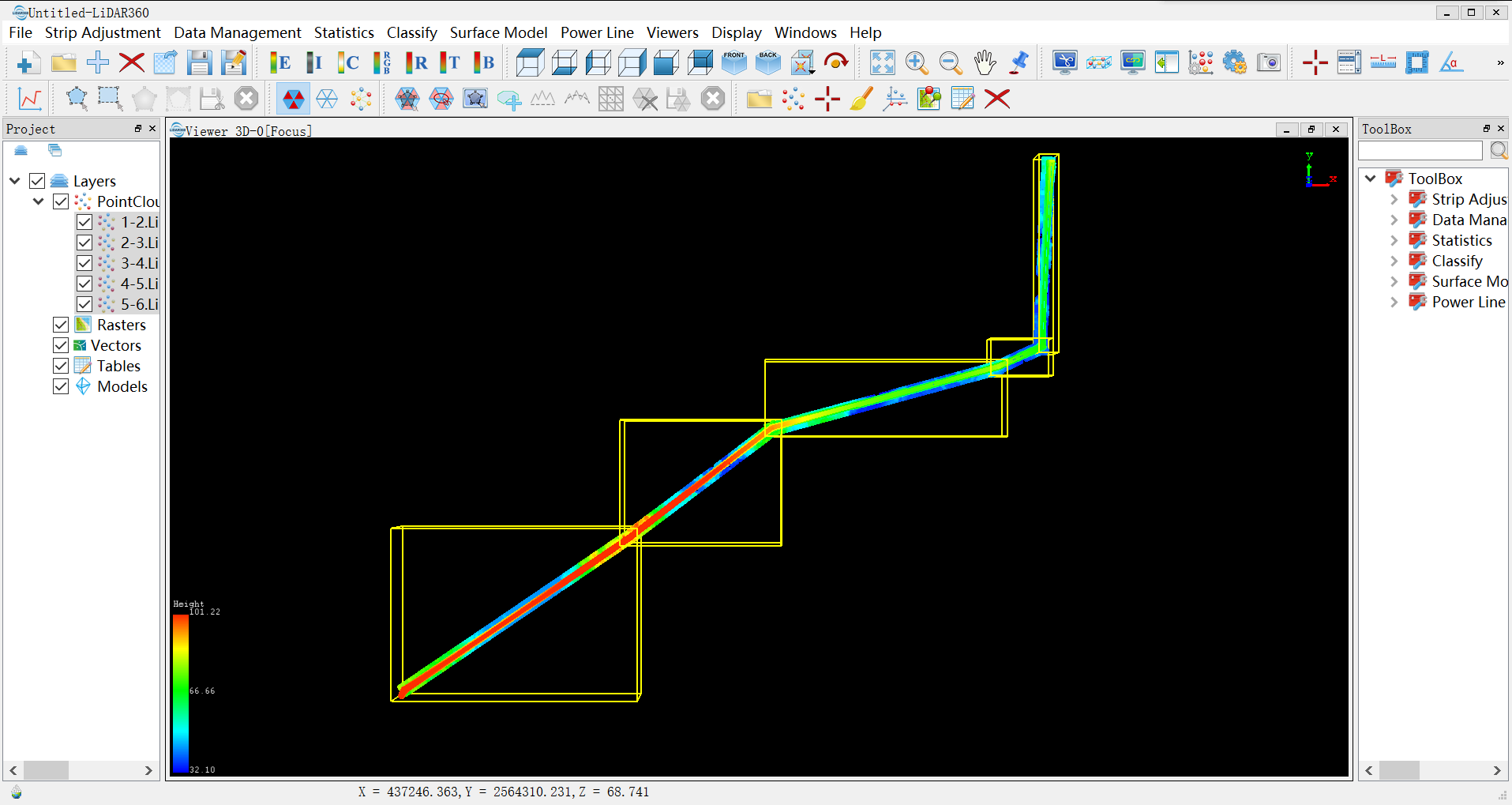
根据杆塔位置、走廊宽度,自动进行杆塔分割
自动进行危险点检测
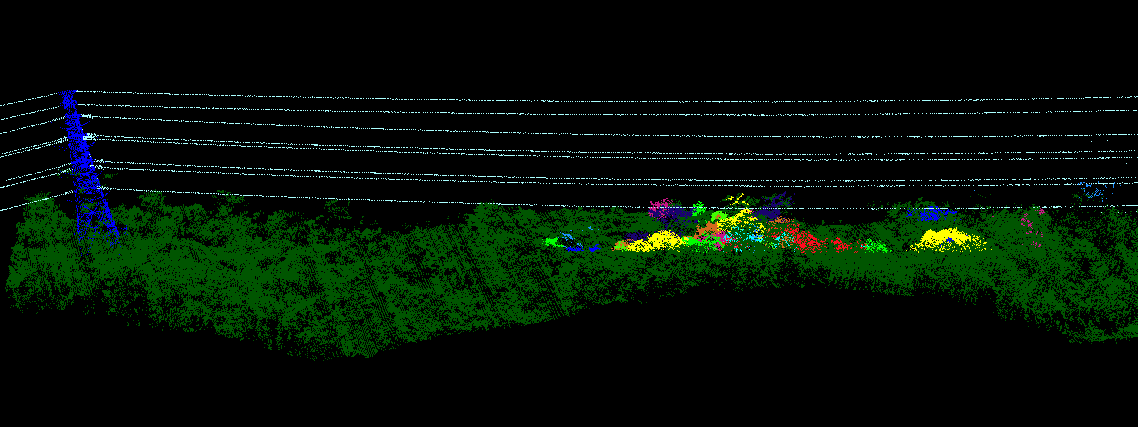
危险点树木单木分割,以不同颜色表示不同的树木