精准的地图对室内定位导航与控制,以及安全至关重要,如何生成高精度地图也是智慧停车领域亟待解决的问题。地下车库停车位表示建筑在地下并可供机动车长期或临时停放的区域,由停车线按一定大小划分了每辆车的停车区域。地下停车场与不同等级的城市道路相配合,满足不同规模的停车需要,对城市中心区的交通起到非常重要的调节和控制作用。高精度的地下车库停车位数据,作为高精度地图的重要一部分尤为重要。
地下停车场的三维场景复现工作目前来说三维激光扫描是最好的解决方案,地下空间通视条件差、结构复杂等特殊性决定了其在三维建模时难以采用常规仪器采集数据,三维激光扫描技术采用非接触测量方式精确获取到被测物体的空间几何信息,通过密集的点云数据可快速复建出物体的三维模型。
它实现了停车场内部的精准定位,通过停车场室内地图,可以清晰了解整个停车场的布局以及车主的车辆位置。室内地图上还能显示停车场内的设施信息,如:出入口、楼梯、电梯、卫生间、充电停车位、残疾人停车位等,客户可以根据车主需求提前进行停车位规划管理。

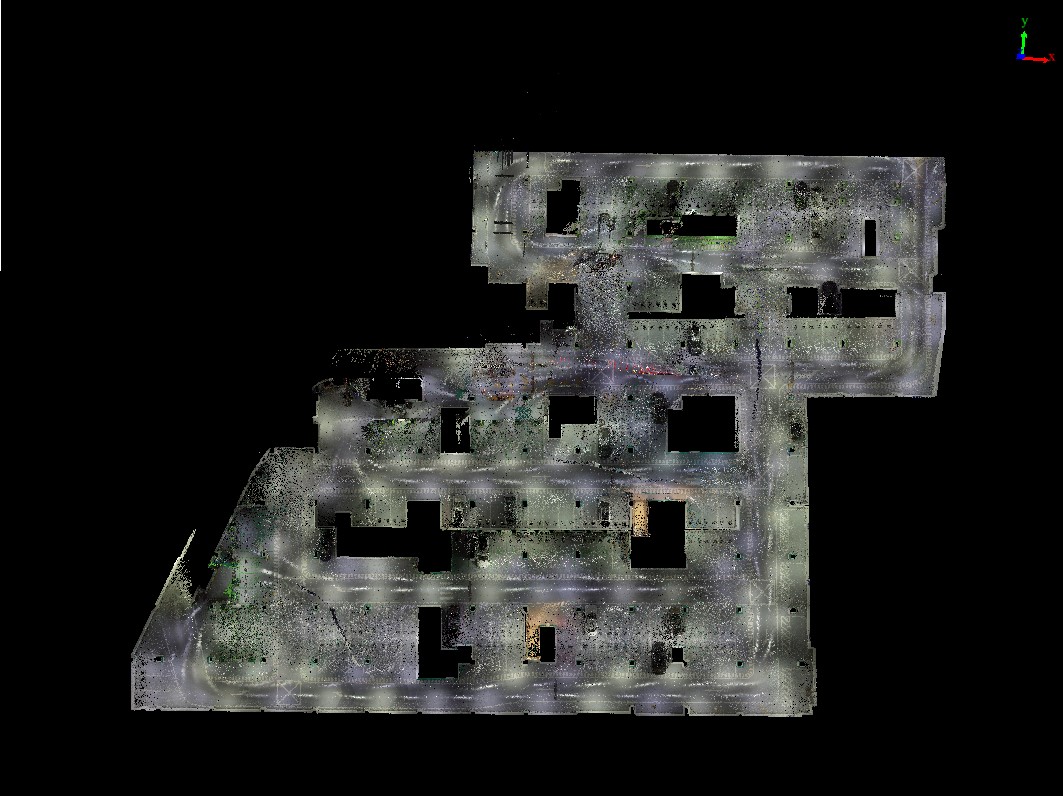
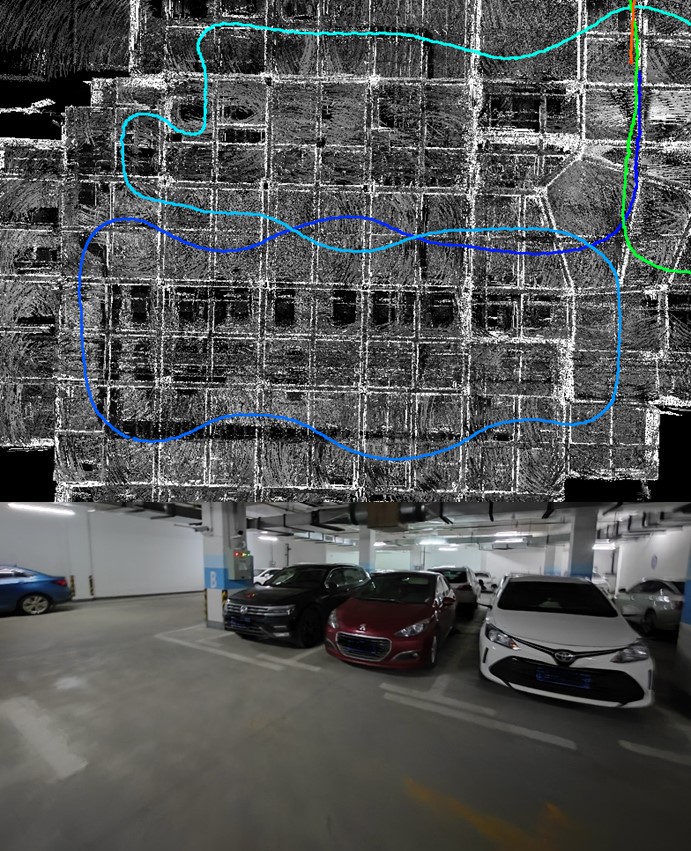
图1 背包激光雷达系统获取的地下车库三维坐标信息
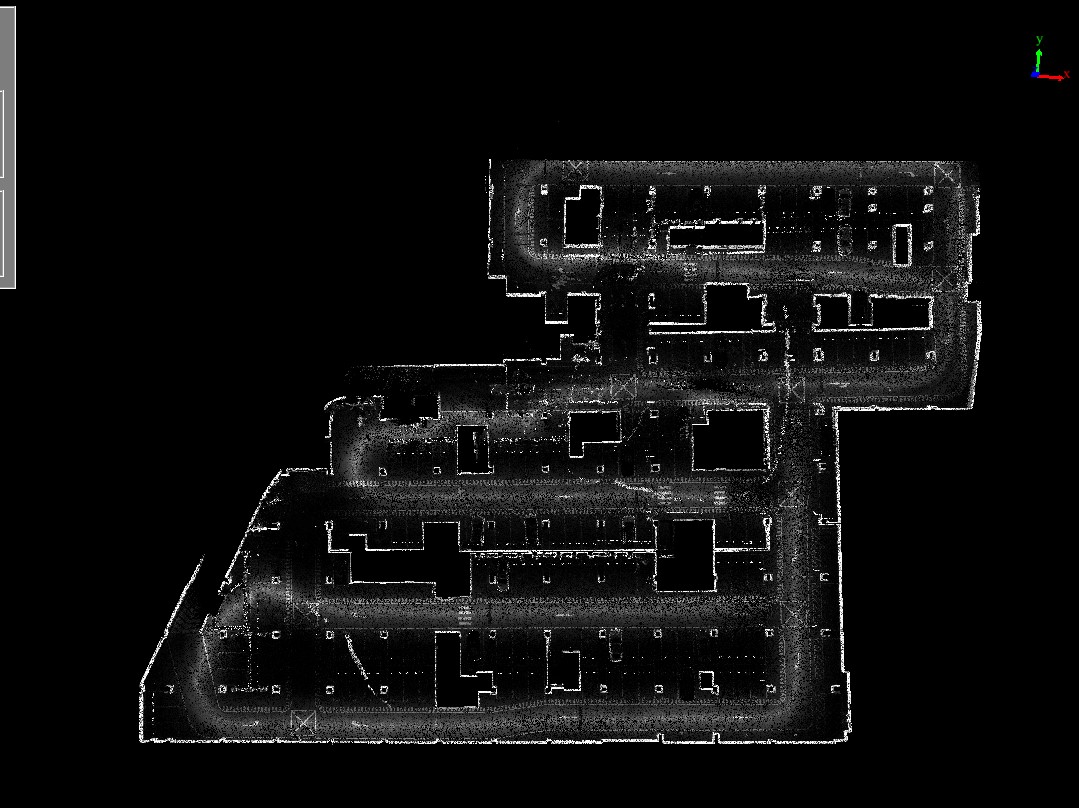
图2 背包激光雷达系统获取的地下车库强度信息
LiBackpack DGC50 背包激光雷达扫描系统
LiBackpack DGC50 背包激光雷达扫描系统是 LiBackpack 产品系列的多传感器综合集成版,该设备在水平和垂直两个方向分别设置激光雷达传感器,同时可选配高分辨率全景相机以及高精度GNSS 设备,结合同步定位与制图构建(SLAM)技术,无论扫描环境中是否存在 GNSS 信息,均可获取扫描范围内的高分辨率全景影像以及高精度三维点云数据。
并结合LiFuser-BP激光雷达数据解算软件可快速处理、可视化、编辑和优化LiBackpack收集的数据,实现高精度的点云解算和轨迹处理。同时该软件具有点云配准,全景标定、提供SLAM数据后处理和报告等功能,以及沉浸式数据可视化和漫游、精确的点云和图像测量、变换和对齐点云等优势。
LiStreet是数字绿土自主研发的地物要素提取及高精地图制作软件,软件支持多种数据源(大规模点云数据、全景影像数据、移动轨迹数据、矢量数据)的导入与处理,同时提供点云分幅功能,实现多人协同制图。界面简洁美观,操作简便,提供大量道路要素模板进行矢量编辑绘制,并根据不同要素特性提供人机交互的半自动矢量提取方式,提高制图效率。针对已绘制完毕的矢量要素,提供多种矢量编辑工具,方便进行节点编辑。软件同时提供矢量属性模板配置和编辑功能,用户可提前自定义各类型图层的属性表配置文件,方便属性表的编辑。
LiStreet软件导出的成果数据可衔接多种GIS平台,在城市市政管理、城市部件普查、高精度地图生产、公路勘查设计与改扩建、数字城市构建、数字园林普查等领域可广泛应用,有助于提升城市信息化建设和管理水平。
图3 某地下车库高精地图全局效果图
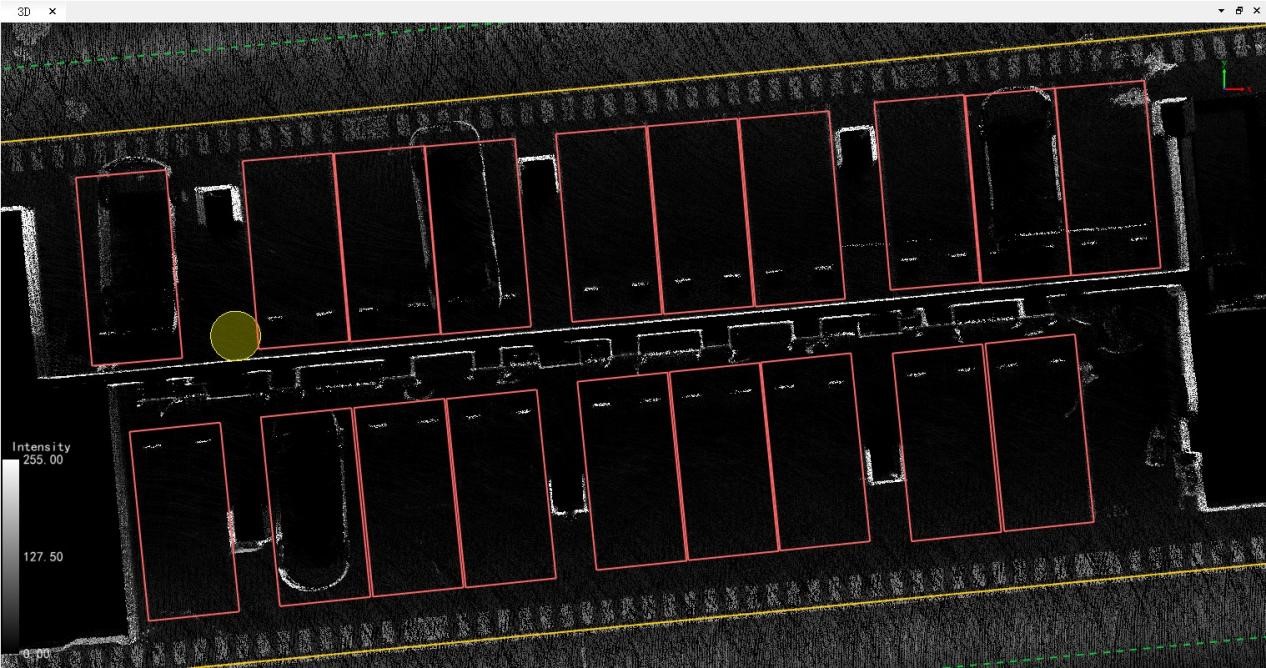
图4 某地下车库高精地图局部效果图
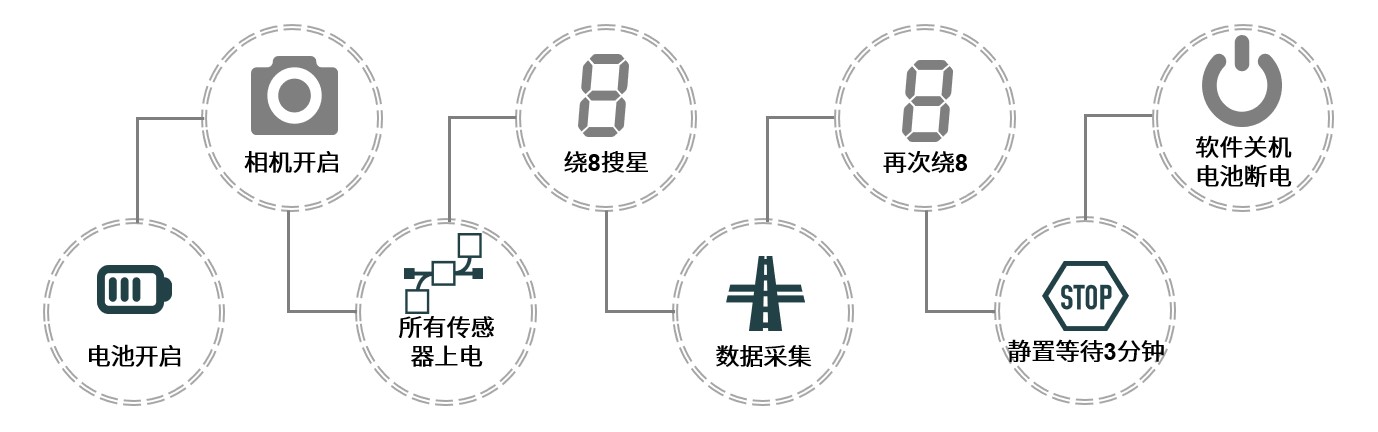
1. 地下车库数据采集时,若地下车库较小,可以在车库外比较空旷的位置,大约保证搜星在20颗以上的位置进行绕8字操作后再进入车库(采集时间不宜过长,越短越好),即可同步获取车库的地理坐标;若地下车库较大,则必须进行分块采集,每一小块都按“日”字即可获取详细点云数据。分成多个工程采集,采集后可用粗配准+ICP精配准进行拼接。
2. 地下室内采集时,采集路线需要事先规划好,以免临时的采集需要重采、漏采、路线繁杂等。地下车库的采集路线以“日”字形为主,走一个闭合路线。采集过程中注意天线位置的高度,避免与管道等的设施碰撞。需要转弯或者蹲下通过的地方,务必要慢,避免数据分层等结果。
3. 如果路线规划中需采集车库外的地面上的数据,建议将起始和结束点选在车库之外的地面上。
4. 单次数据采集时长控制在20分钟左右。
图6 数据采集闭环路线示意图
点云数据解算
若无GPS信息,则默认将点云投影到当前采集环境的WGS84 UTM6度带坐标系下。
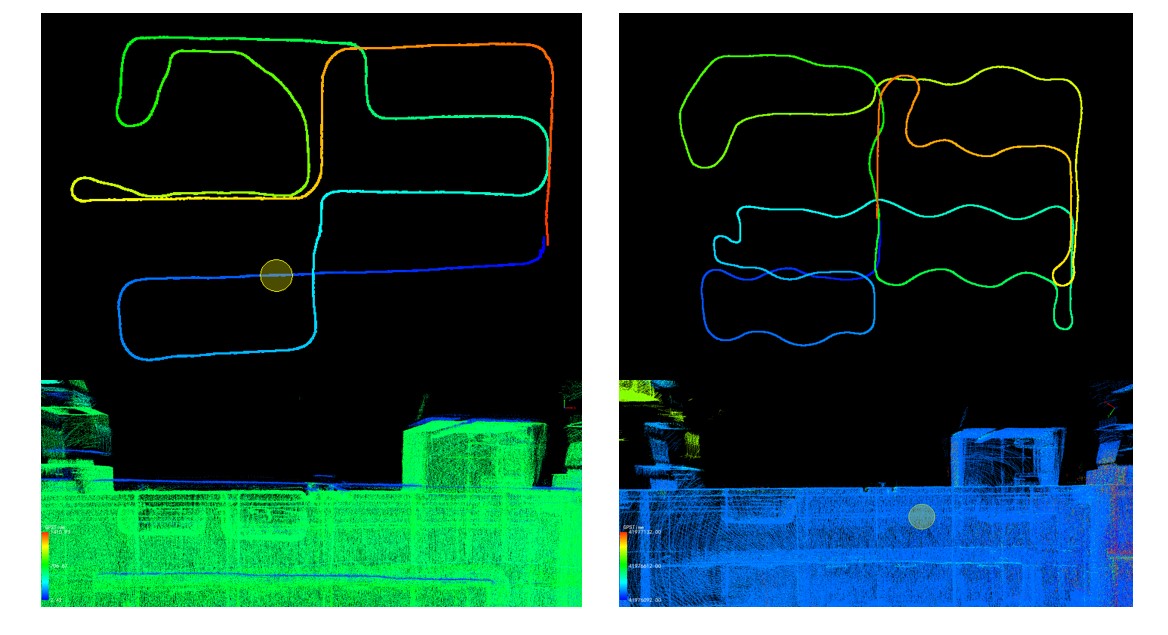
路径规划优化方案:
图7 路径优化示意(左为原始路径,右为优化路径)
采集路径规划步骤通过解算得到的点云数据,导入LiStreet软件中,进行高精地图中各要素层的绘制。
地下车库场景复杂,同城包括出入口标志牌,车位置是标志牌,斑马线、车道线、箭头标线等地面标志,墙面标志,充电桩等地物信息。通过菜单栏“地图”中,选择要绘制的形状类型,对应绘制不同的城市道路场景要素。
地下车库高精度地图涵盖停车场背景、路网、标识、车位、设施等要素,可满足有人驾驶的泊车需求,帮助车主实时、快速地找到相应的停车位,帮助停车管理方、物业等提高车辆的管理效率与运营效率。
停车场的高精度地图可以方便用户快速找到停车区域,解决地下人防工程中的导航问题,实现从现实车位到泊位的直接导航。
停车场高精度地图中还可以包括充电桩等车库设施部件,方便解决旅程中令人焦虑的充电桩问题。
地下车库往往覆盖众多楼层,可以通过车位的引导加反向寻车技术,借助高精度地下车库地图辅以点云数据构建的建筑物室内外一体化微场景,解决复杂车库快速寻车问题。
地下停车场的高精度地图同样可以应用于实现自主代客泊车上,由汽车自行完成从停车场入口到停车位的泊车过程,或自动完成从停车位到停车场出口的过程。
结合基于LiBackpack(SLAM背包式激光雷达)和LiStreet的高精度地图解决方案不仅可应用于地下车库安全管理领域,同样可以扩展至地上公路勘查、数字城市构建、数字园林普查等领域。生产方案高精地图不仅对室外定位导航至关重要,地下车库的控制与管理更需要高精度地图的生产技术。目前,数字绿土已经为政府、企业、技术服务集成商等行业客户提供背包地下车库高精地图解决方案。未来,数字绿土将在高精地图等新技术领域持续加大研发投入,全面提升高精度地图生产技术服务能力,保障三维激光扫描高精地图技术健康发展。