
基于点云进行线路通道隐患分析时,导线到树障的净空距离的准确性取决于点云的相对精度,如果精度太低,会导致树障点的误判。同理,基于点云做杆塔倾斜、横担高差、导地线弧垂等分析计算时,相对精度低也会严重影像计算结果的准确性。如果用在无人机精细巡检方面,就得满足点云的绝对精度要求,当绝对精度低时,点云和实际地理位置偏差会增大,基于点云规划的无人机航线采集的照片范围会偏离目标物,更严重的会导致无人机撞到电力设备。
● 其他工具:RTK设备、LiGeoreference解算软件、LiDAR360软件。

「数字绿土LiAir X3」
尽量走直线;如需拐弯,要远离航线,尽可能多设点,增大转弯半径,避免原地掉头。航线超出测区范围50米以上,航带重叠率30%。

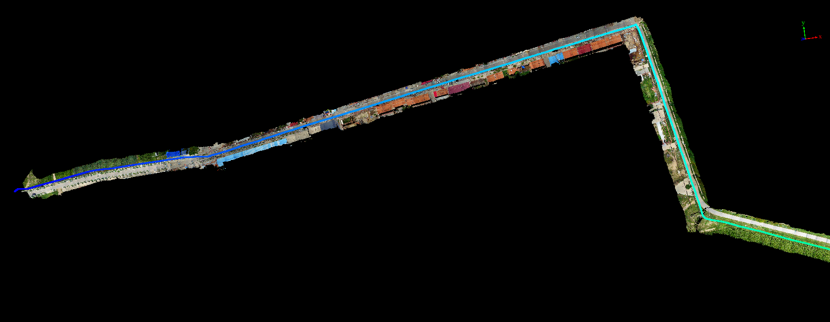
「飞行轨迹图」
控制点应均匀分布在测区范围内,最好要分布在整个作业区域的边缘,将测区范围完全包围,若不能完全包围,可以采取适当调整控制点的位置、增加新的控制点的方法来解决,并避免短边控制长边。控制网宜以边连接为主辅以点连接,这样可减少工作量。
「带状测区控制点分布图」

「RTK测量打点」
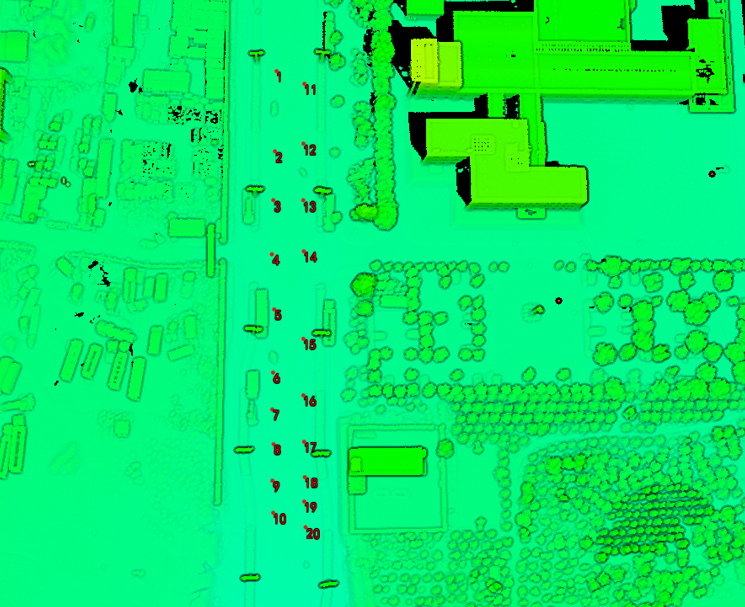
用RTK采集的检查点坐标及点云导入LiDAR360,如下图所示:
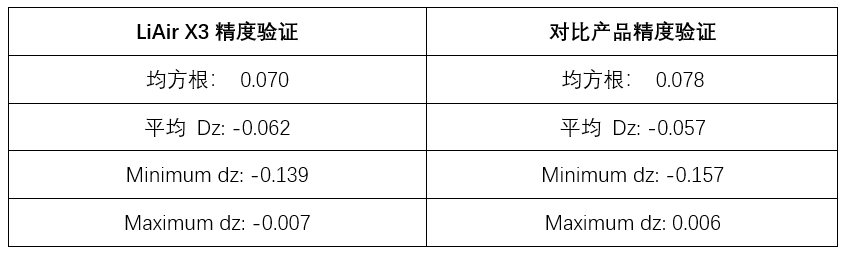
分析计算点云精度情况,如下图表所示:
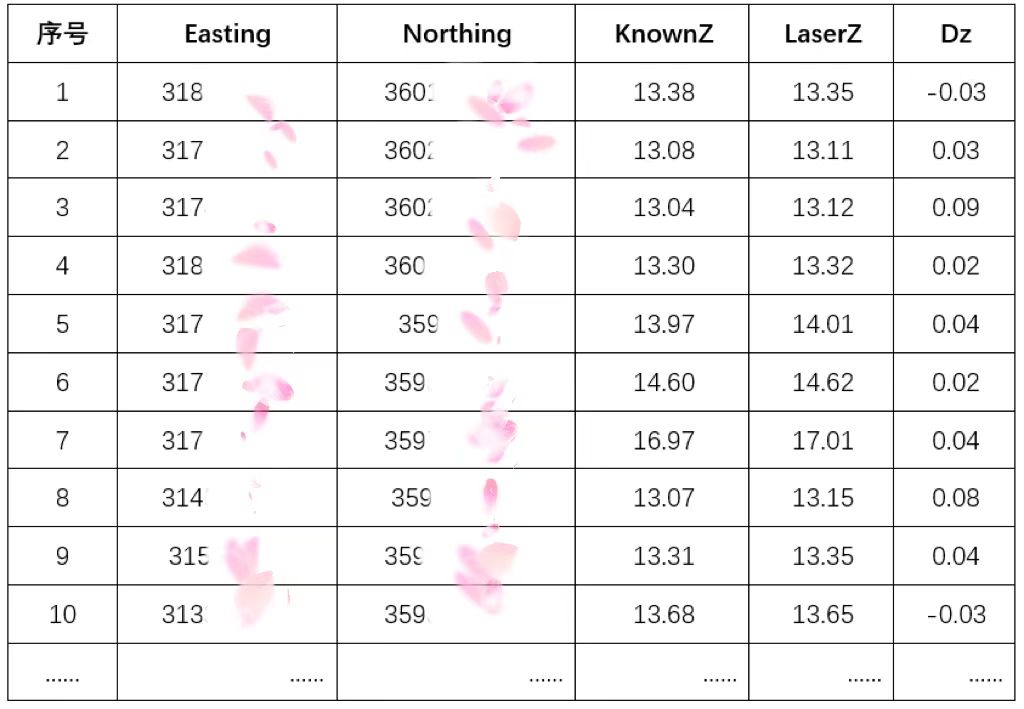
产品精度对比表
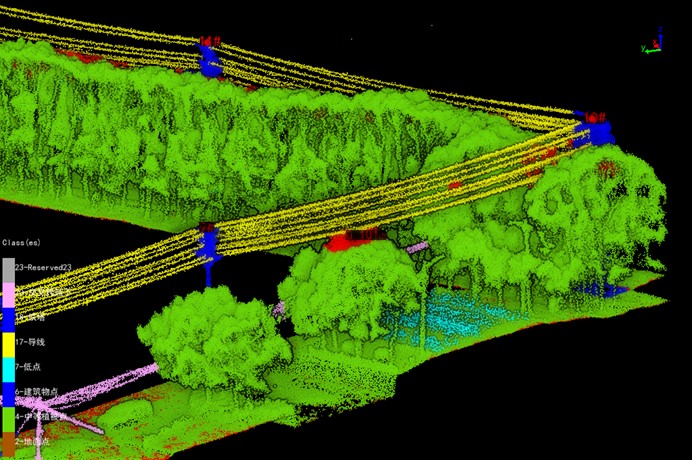
 「输电主网点云数据图」
「输电主网点云数据图」
 「变电站点云数据成果」
「变电站点云数据成果」
 「配网点云数据成果」
「配网点云数据成果」
LiAirX3满足以上所有条件,可以满足大部分应用场景,给客户带来高精度点云的采集体验。