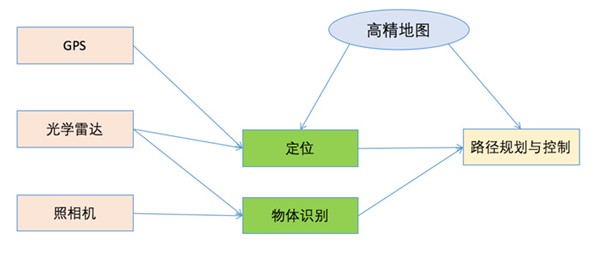
首先简单描绘下无人驾驶技术与涉及该技术的硬件和软件之间的关系(如下图所示)。

LiDAR是一种光学遥感技术,其具有优异的方位分辨率,能够精确地检测到与周围障碍物的距离和位置关系,配合先进的SLAM算法可以实现实时定位与构图,建立周围的3D点云模型,为自动驾驶车提供定位辅助和障碍物检测支持,进一步构建真值系统,辅助高精度地图的绘制和信息验证。
车载平台中的GPS/GNSS用于定位,虽然目前高精度的军用差分GPS/GNSS在静态的时候可以在“理想”的环境下达到厘米级的精度。但是在复杂的动态环境中,如大城市中,由于各种高大建筑物的阻拦,得到的GPS/GNSS定位信息很容易就有几十厘米甚至几米的误差。对于在有限宽度上高速行驶的汽车来说,这样的误差很有可能导致交通事故。因此必须要有GPS/GNSS之外的手段来增强无人车定位的精度,例如相机、LiDAR等。可通过L-SLAM和V-SLAM技术对位姿信息进行优化,提升信号遮挡位置的精度。另外,激光LiDAR的测距精度高,可在自动驾驶中也发挥必不可少的作用。
「数字绿土自研车载平台」
「高精地图点云数据成果图」
众所周知,在机器视觉中一个比较难解决的问题就是判断物体的远近,基于单一摄像头所抓取的2D图像无法得到准确的距离信息。而基于多摄像头生成深度图的方法又需要很大的计算量,不能很好地满足无人车在实时性上的要求。另一个棘手的问题就是光学摄像头受光照条件的影响非常大,物体的识别准确度很不稳定。可能由于相机曝光不充分,特征点没有匹配成功。而且2D物体由于维度缺失的问题很难在这个情境下做出正确的识别。利用LiDAR所生成的点云可以很大程度上解决上述两个问题,借助LiDAR的特性,我们可以对反射障碍物的远近、高低甚至是表面形状有较为准确的估计,从而大大提高障碍物检测的准确度,而且这种方法在算法的复杂度上低于基于摄像头的视觉算法,因此更能满足无人车的实时性需求。
数字绿土在无人驾驶领域能够实现软硬一体化,不仅自研车载采集套件,可实现多源传感器的高精度几何标定和时空同步,还自研了LiDAR360 MLS软件(即三维要素提取及GIS测图软件,原LiStreet软件),对车载传感器的数据进行多源融合、配准和精度优化,且支持点云的自动化分类,以及交通要素的精准提取。该软件可为高精度地图制作赋能的同时,也可为自动驾驶车提供用于验证的真值系统。目前,多源传感器的融合技术,尤其是激光雷达和相机数据的融合,可为机器学习算法提供多丰富和准确的信息,也可降低后续感知算法的实现难度,这里的感知算法包含服务器端的要素感知和终端的要素感知。
通过使用GPS与LiDAR进行信息混合,同时搭配全景相机等其他传感器配合先进的算法可以实现精准定位与识别,这也是目前数字绿土正在致力研究的方向。

 「数字绿土自研车载平台」
「数字绿土自研车载平台」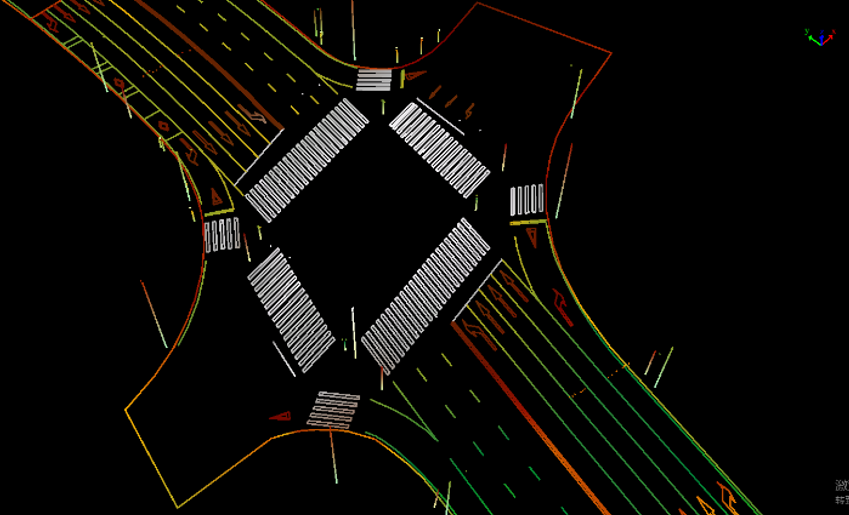 「高精地图点云数据成果图」
「高精地图点云数据成果图」