
哈喽小伙伴们大家好~
又到了 GV访谈 时间了
本期的话题是
#森林生态#&#城市部件普查#
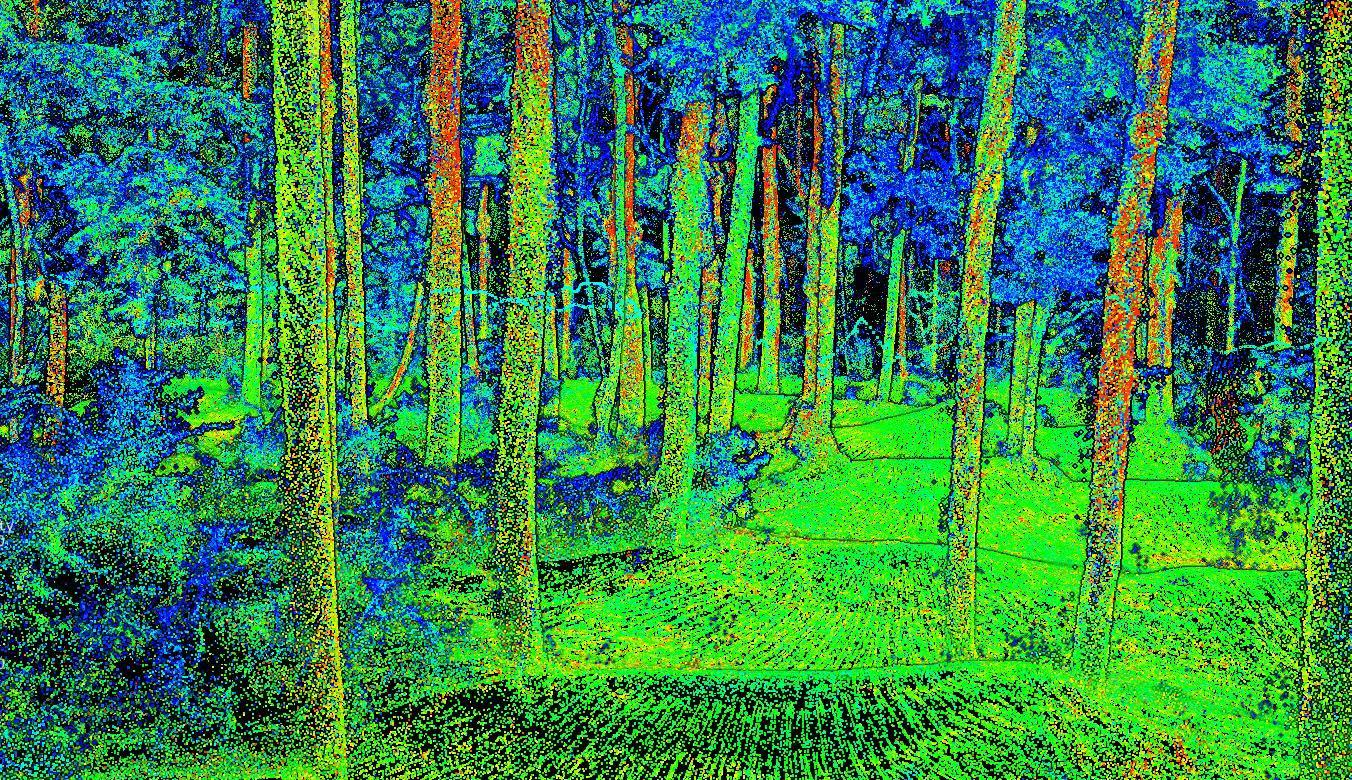 「森林生态点云数据成果图」
「森林生态点云数据成果图」
4、机载点云数据,CHM单木分割结果是怎样确定分割精度呢,是通过目视解译吗?
通过目视解译,CHM成果叠加基于CHM生成的种子点文件。
5、机载点云数据单木分割成果中,单木位置是树冠的中心还是树干的中心呢?
机载点云进行单木分的成果,单木位置是树冠中心的。
PART 2:城市部件普查
1、请问做部件普查应用的话,推荐的采集设备是什么样呢?
部件普查目前主流的设备还是RTK和全站仪,但是这种设备目前存在着效率低、不安全、信息不完整等问题,我推荐使用车载激光雷达采集道路及两旁的点云和全景数据,对于遗漏或者缺失、需要补测的区域可以使用背包/手持 三维激光扫描仪进行。

2、咱们轨迹和点云解算软件是二次开发平台吗?集成哪些算法呢?和国外其他软件有和不同之处?
轨迹和点云解算软件是我们独立自主研发的,拥有完全技术知识产权。集成高精度点云轨迹解算、点云附色,安置角解算、点云和全景标定等功能。车载和机载的解算软件——LiGeoreference 支持多种GNSS模式、可自主扩展其他各类传感器、动态对准、可与各类GIS载荷深度融合,这是其他轨迹和点云解算软件所不具备的。LiGeoreference 与国外同类最高水平竞品相比,核心性能一致,局部指标和特性更优。
3、软件是一站式全流程作业嘛?是否需要依赖三方软件?
软件是一站式全流程作业,包括预处理(安置、点云和全景匹配、控制点纠偏、多工程拼接),绘图我们是基于GIS的,包括的点线面的绘制,属性表的配置和一些自动属性填充和联想,数据我们也可以导出为SHP格式,客户可以直接拿来用。
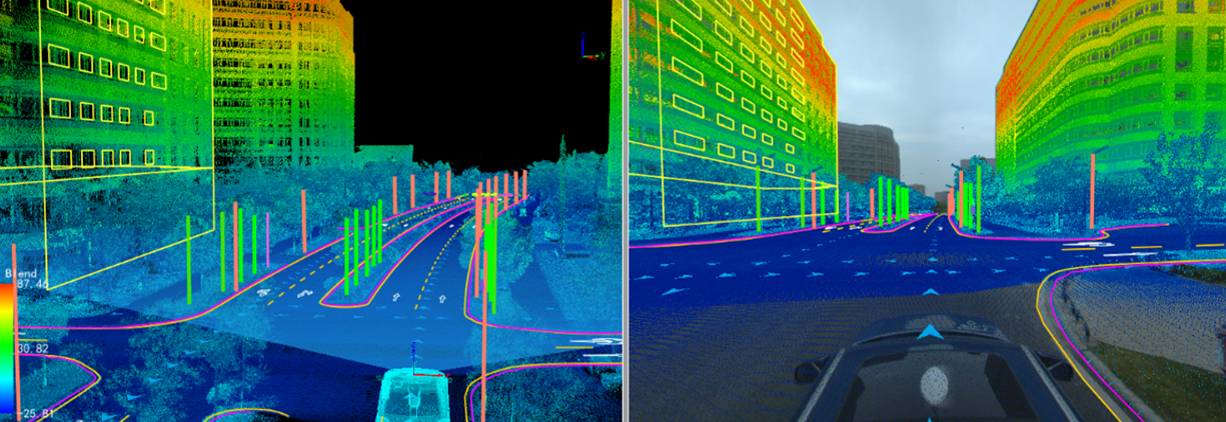
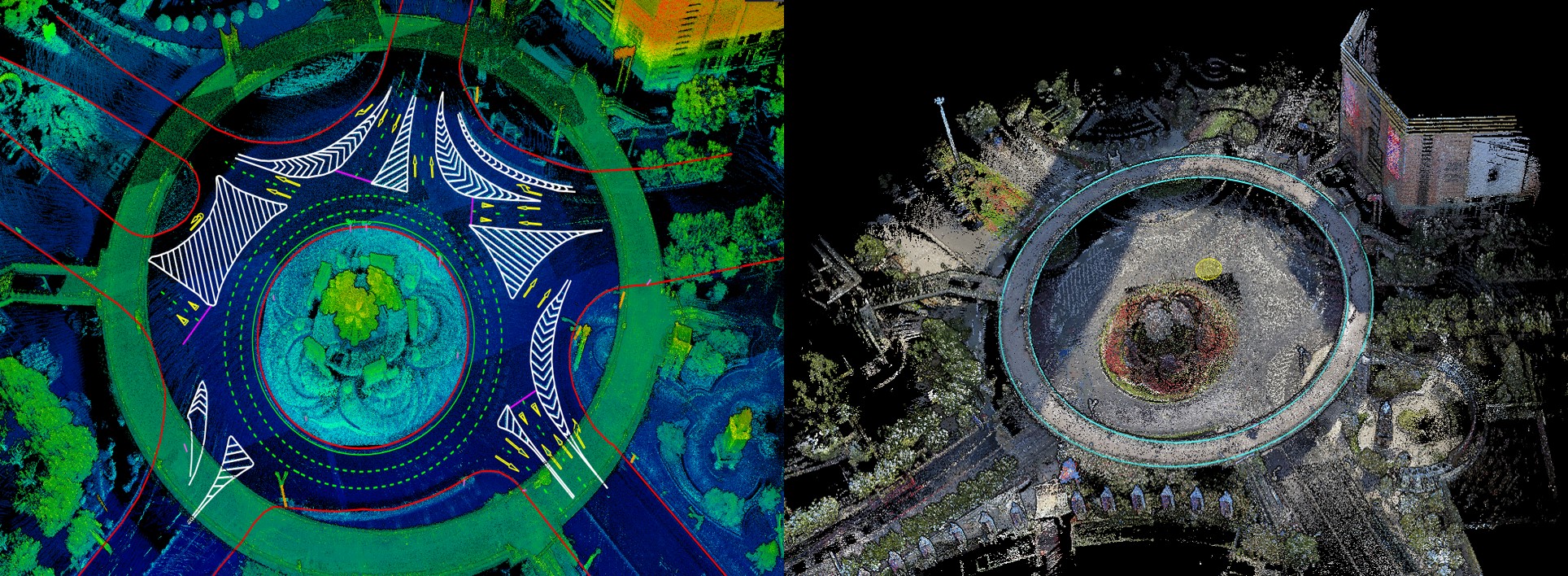 「数字绿土LiDAR360 MLS高精地图点云成果图」
「数字绿土LiDAR360 MLS高精地图点云成果图」