
一、功能介绍
二、准备工作
在进行时间转换时还有一种情况是需要在GPS时(GPS周-周秒)和公历日期之间进行转换(对应LiDAR360中GPS周秒调整与GPS时转换功能)。
(备注:GPS时也称GPS time/GPST,是GPS系统内部所采用的时间系统。时间零点定义的为1980年1月5日夜晚与1980年1月6日凌晨之间的0点。GPS周即从时间零点开始经过的周数,最大时间单位是周(一周:604800秒),GPS周秒即本GPS周开始后经过的秒数,GPS时等于N*604800+GPS周秒,N代表GPS周数,实际软件计算一般为调整GPS时,即GPS时-10的9次方。)
所以要想实现GPS周秒与GPS时的转换必须知道数据实际采集日期。
三、操作流程
点击工具箱>航带拼接>安置,或点击预处理>安置软件弹出安置模块,接着单击打开航迹线文件,若没有设置工作目录,将先弹出对话框设置工作目录,勾选与点云匹配的SBET(*.out)航迹线文件。
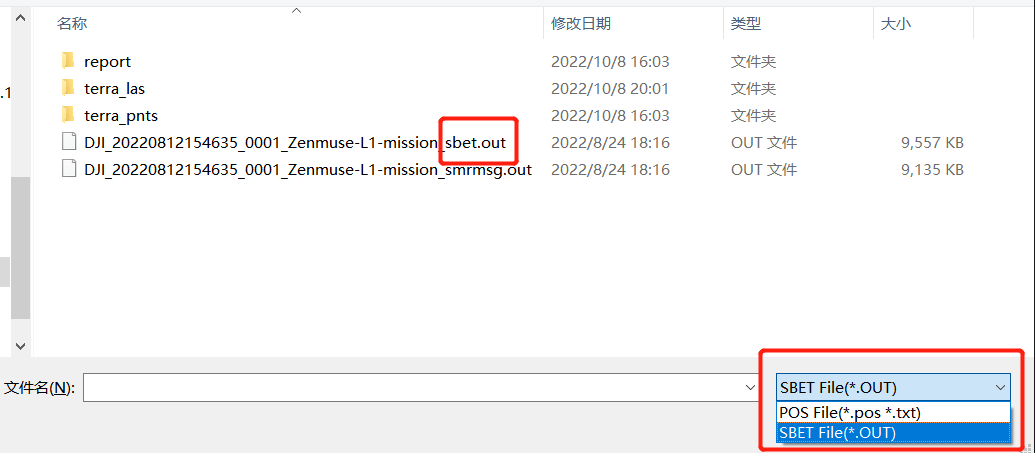 图1 打开SBET(*.out)文件
图1 打开SBET(*.out)文件
2. GPS时间转换
当选择与点云匹配的航迹线文件后,需要选择是否进行GPS时间转换,勾选“GPS时间转换”,选择源GPS时间,及“转换为”,采集日期选择点云数据采集日期,将点云与航迹线时间转换一致。点云的采集日期我们可通过文件夹的命名查看,点云GPS时间的我们可以通过点云>信息查看,可看到调整后的点云与航迹文件均为调整GPS时,如下图所示。
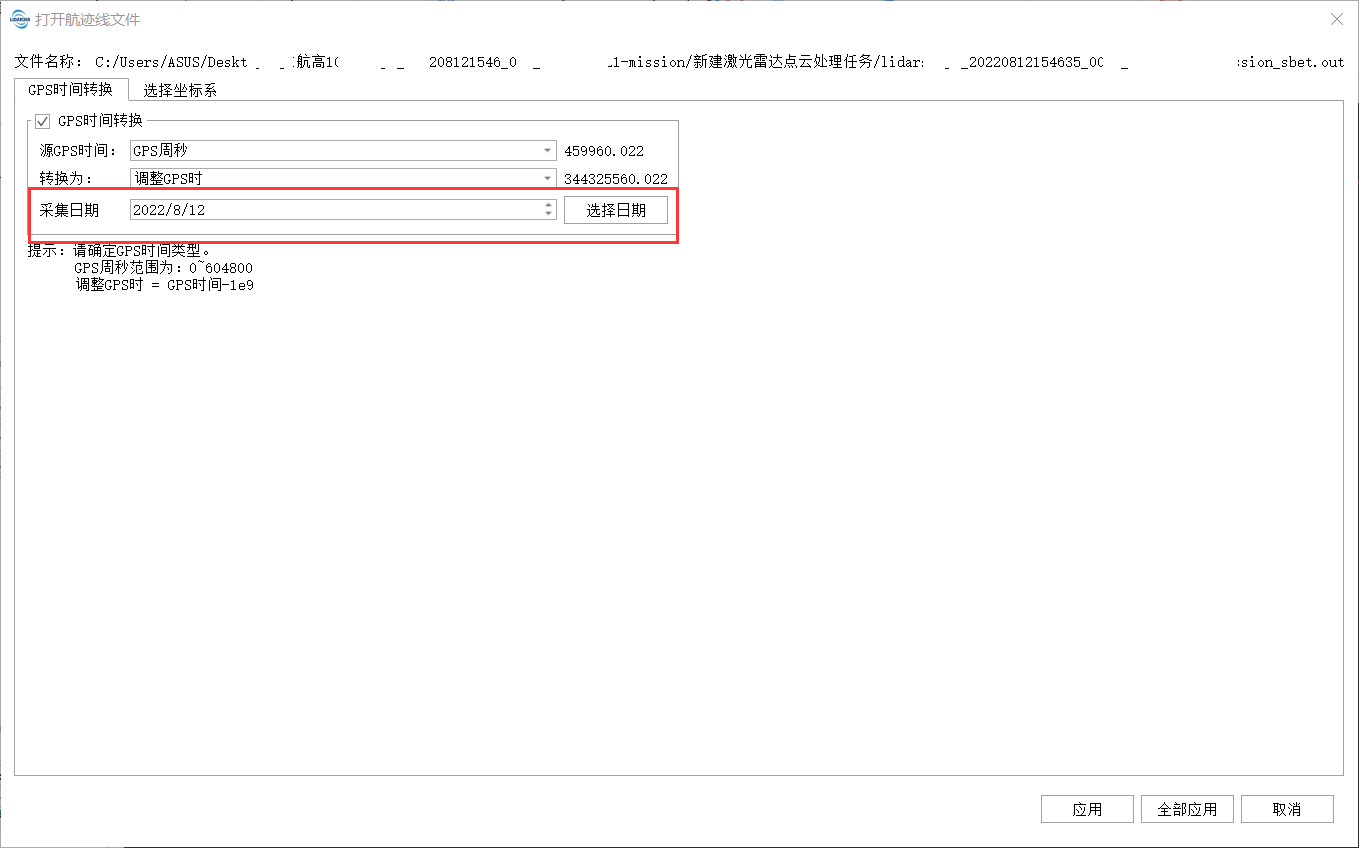 图2 GPS时间转换界面
图2 GPS时间转换界面
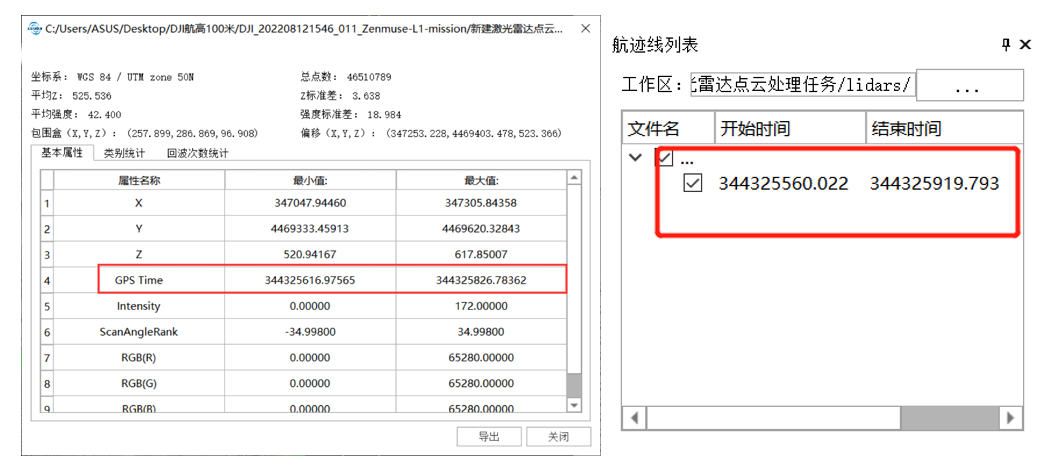 图3 点云GPS时间与航迹线GPS时间基准一致
图3 点云GPS时间与航迹线GPS时间基准一致
3. 选择坐标系
由图3我们可以看到,除GPS时间转换外,还有一个选项为选择坐标系。SBET文件没有坐标系,应在加载时选择一个与点云数据对应的坐标系。点云的坐标系可以在点云>信息里查看。
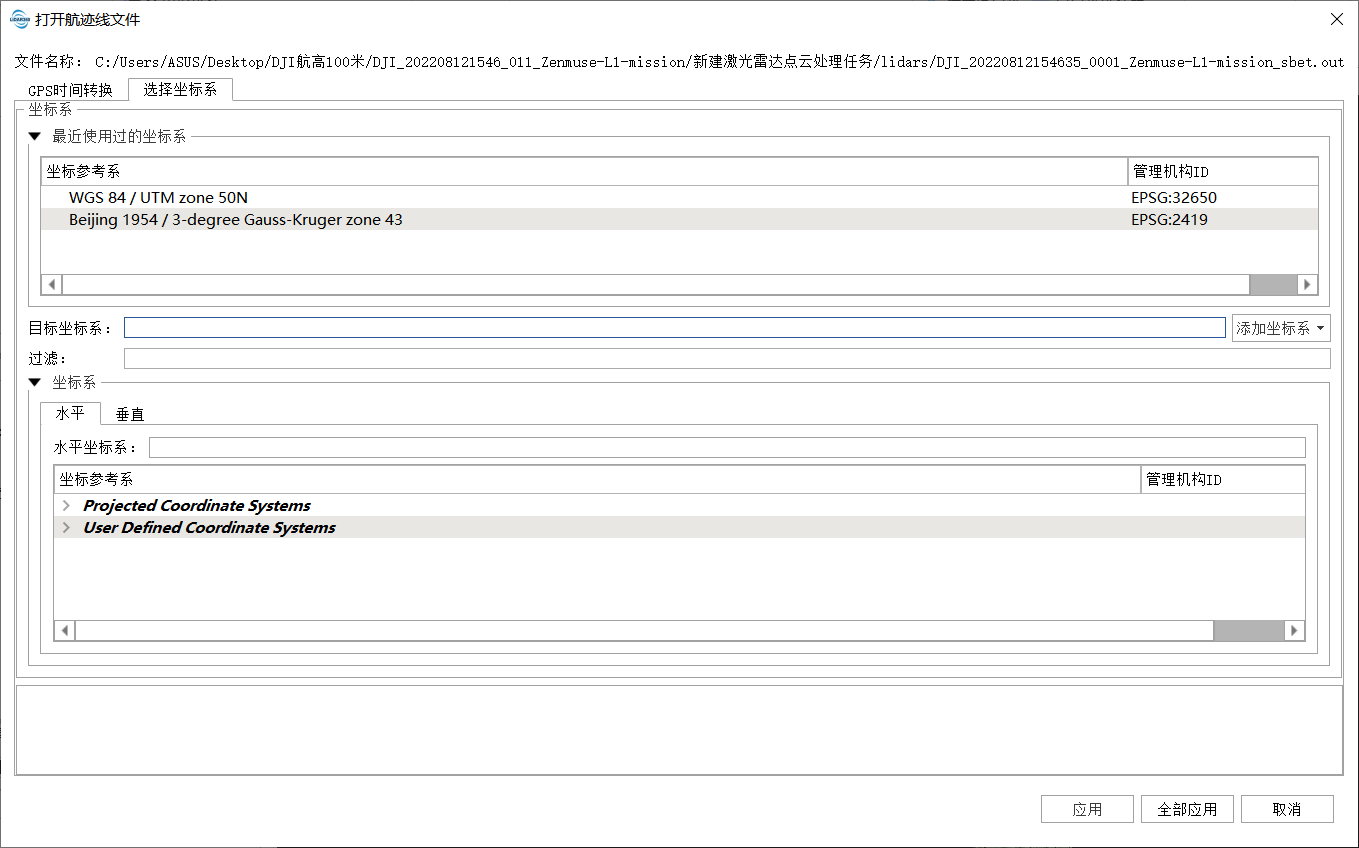 图4 选择坐标系界面
图4 选择坐标系界面
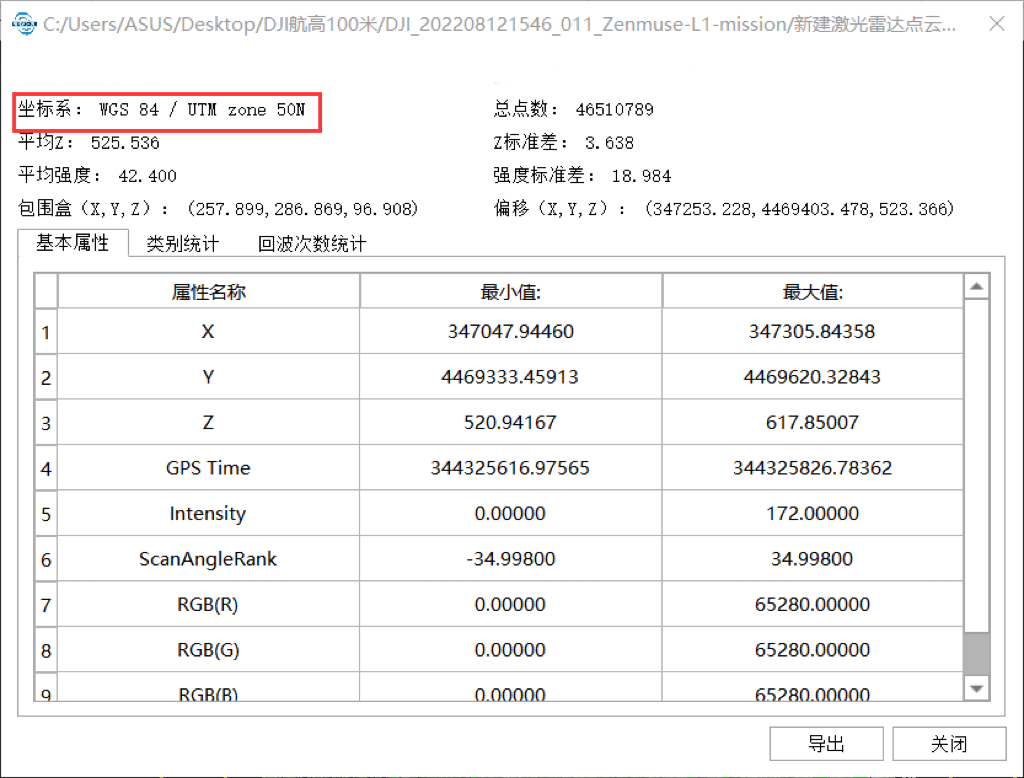 图5 查看点云坐标系
图5 查看点云坐标系
点击全部应用,便可以将载航迹线加载到工作窗口。
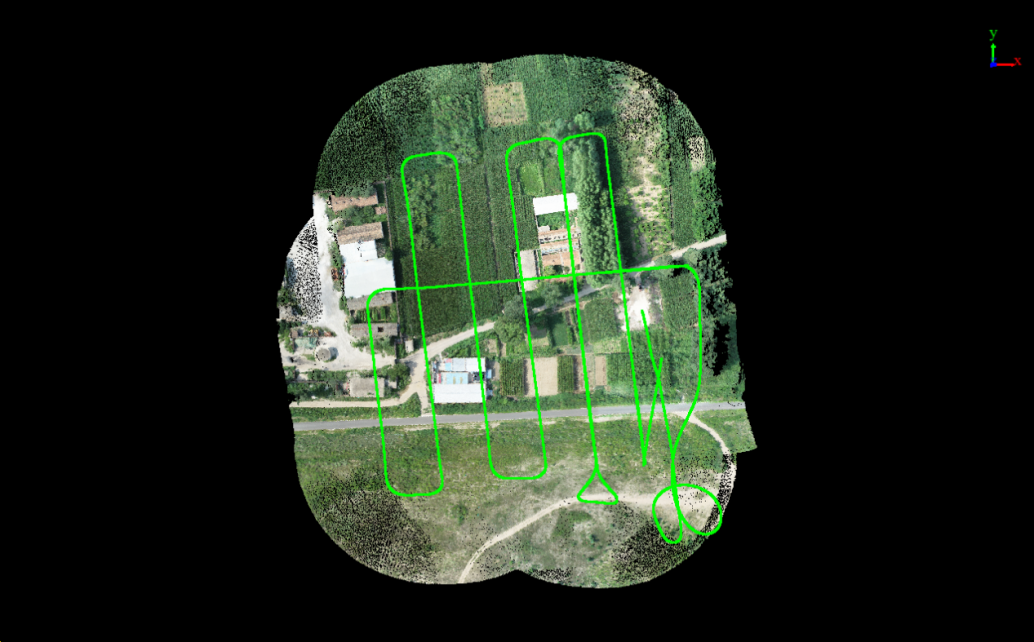 图6 航迹线与点云叠加显示
图6 航迹线与点云叠加显示
5. 裁切点云
打开载航迹线文件后,可以对点云以及航迹线进行操作。可根据航迹线裁切点云,再将点云与航迹线匹配,表现为同一种颜色(即点云数据与航线通过GPS时间戳信息进行匹配)。至此,航线与点云数据已经裁切完并完成匹配,接下来对航飞数据的做质量检查工作。
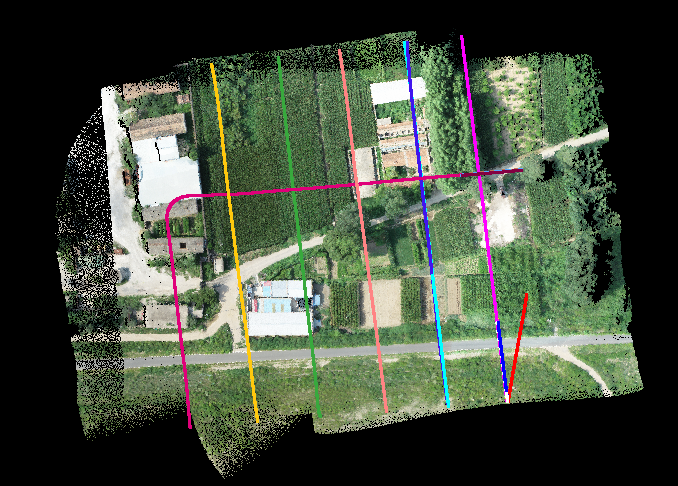
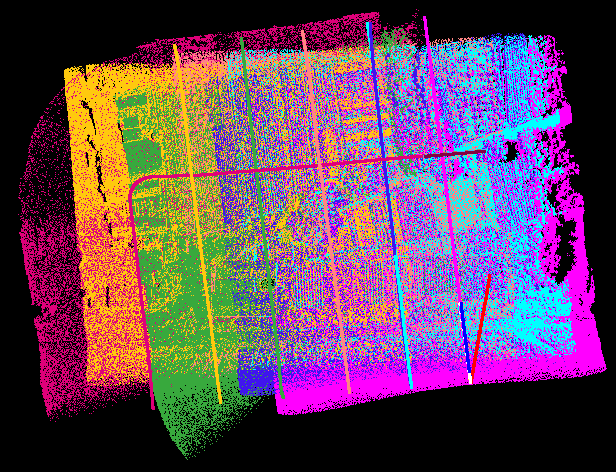 图7根据航迹线裁切点云结果 图8点云与航迹线匹配
图7根据航迹线裁切点云结果 图8点云与航迹线匹配
1. 检校
检校前,通过剖面查看工具,查看数据拼接质量。观察时,尽量选取房屋等有规则形状的物体进行查看,更易观察出拼接效果。接着单击检校,设置安置误差修正值,点云数据会根据该修正值进行相应的变换操作,以实现最终基于航带的点云拼接。
值得注意的是,界面上方的参数变换类型,当其为“加载的点云”时,是指将加载到窗口的点云进行变换,变换后的点云并不进行存储。用户可通过开启剖面观察点云拼接的质量,调整相关参数。当参数调整到最佳时,可将变换类型调整为“选择的点云文件”,并勾选点云文件对点云进行航带拼接,结果会自动保存到点云文件中。LiDAR360会统计对齐质量,点击“对齐质量”标签页可查看该统计信息,点击“导出”可保存该信息。
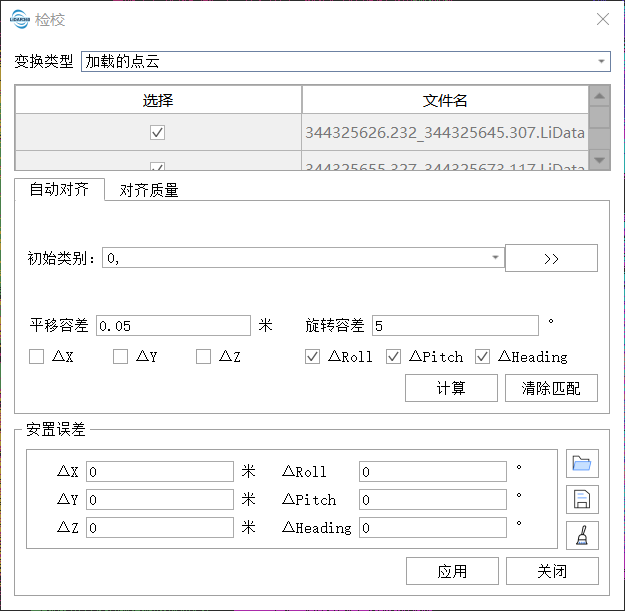 图9 检校界面
图9 检校界面
2. 去冗余
为保证获取区域的点云质量及后续数据处理的效率,可以去除重叠区域的质量较低的冗余点。数据按类别显示,查看数据去冗余结果,以本案例为例,黄色区域即为冗余点,予以去除。
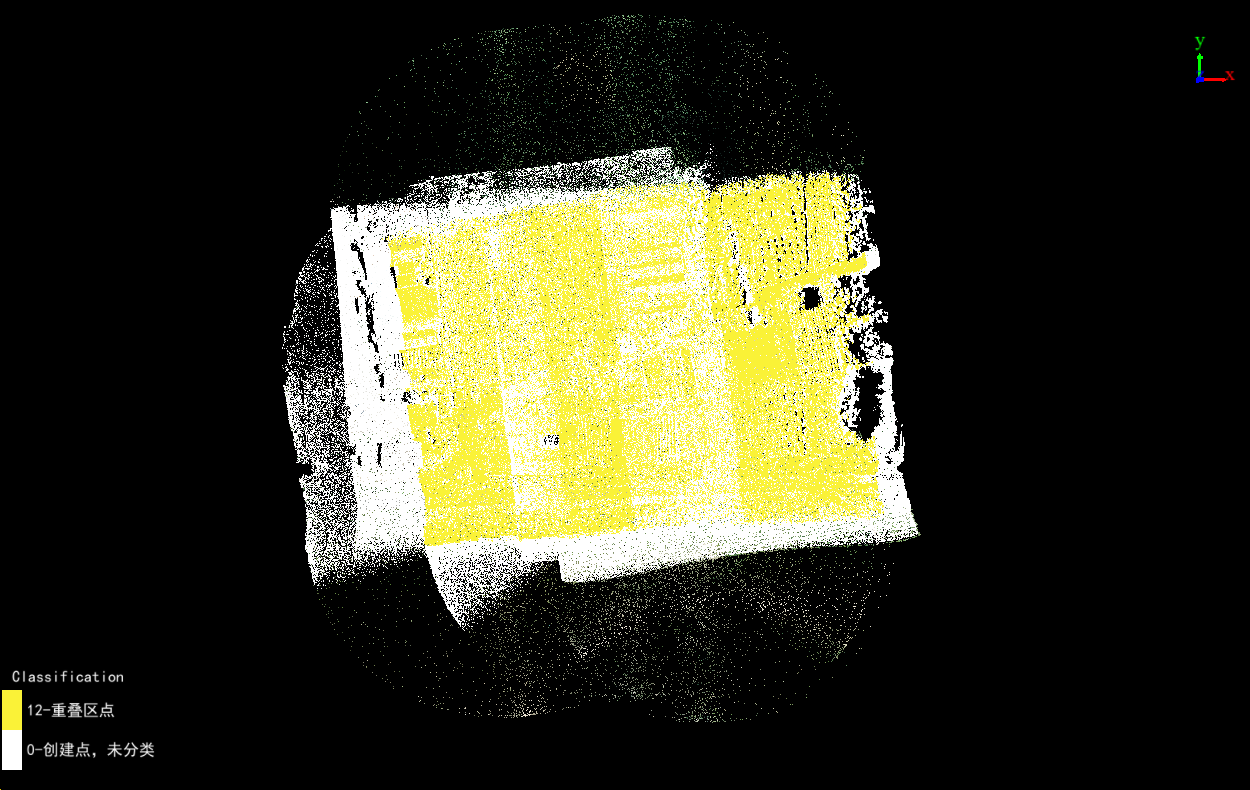 图10 冗余点按类别显示
图10 冗余点按类别显示
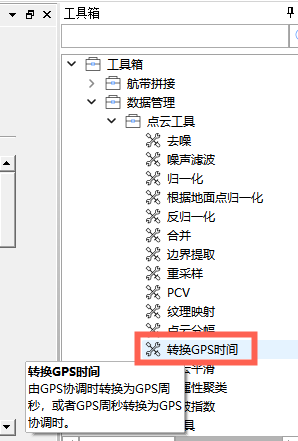 图11 LiDAR转换GPS时间功能图示
图11 LiDAR转换GPS时间功能图示
LiDAR360安置检校功能是提升机载LiDAR系统点云质量的高效工具,可有效解决因传感器安置的系统误差导致的点云各航带数据分层和冗余问题,极大地提高航飞点云数据的质量!