
在机载点云采集的工作实践中,受到航高和视场角限制等各类复杂因素的干扰,不同的航带和架次的数据间往往存在多种误差,影响数据的整体质量和后续使用。LiDAR360“航带平差”功能则为目前最主流的,消除机载点云系统误差的方式。
LiDAR360 V6.0优化了航带平差功能,同时支持联合控制平差,支持导入大机载设备、无人机设备采集点云成果,一键处理,高效提升大范围点云数据的整体精度。
本次案例的需求为按1:500地形图测绘标准,采集江西婺源某山区1平方公里的高精度点云数据并完成预处理,以高质量的数据成果支持后续应用。
对需求范围进行外延后,外业人员使用无人机设备进行了4个架次的作业,采集了22条航带、有效面积为1.2平方公里、总点数约4亿、点密度约300/平方米、共计约17G的原始点云数据。
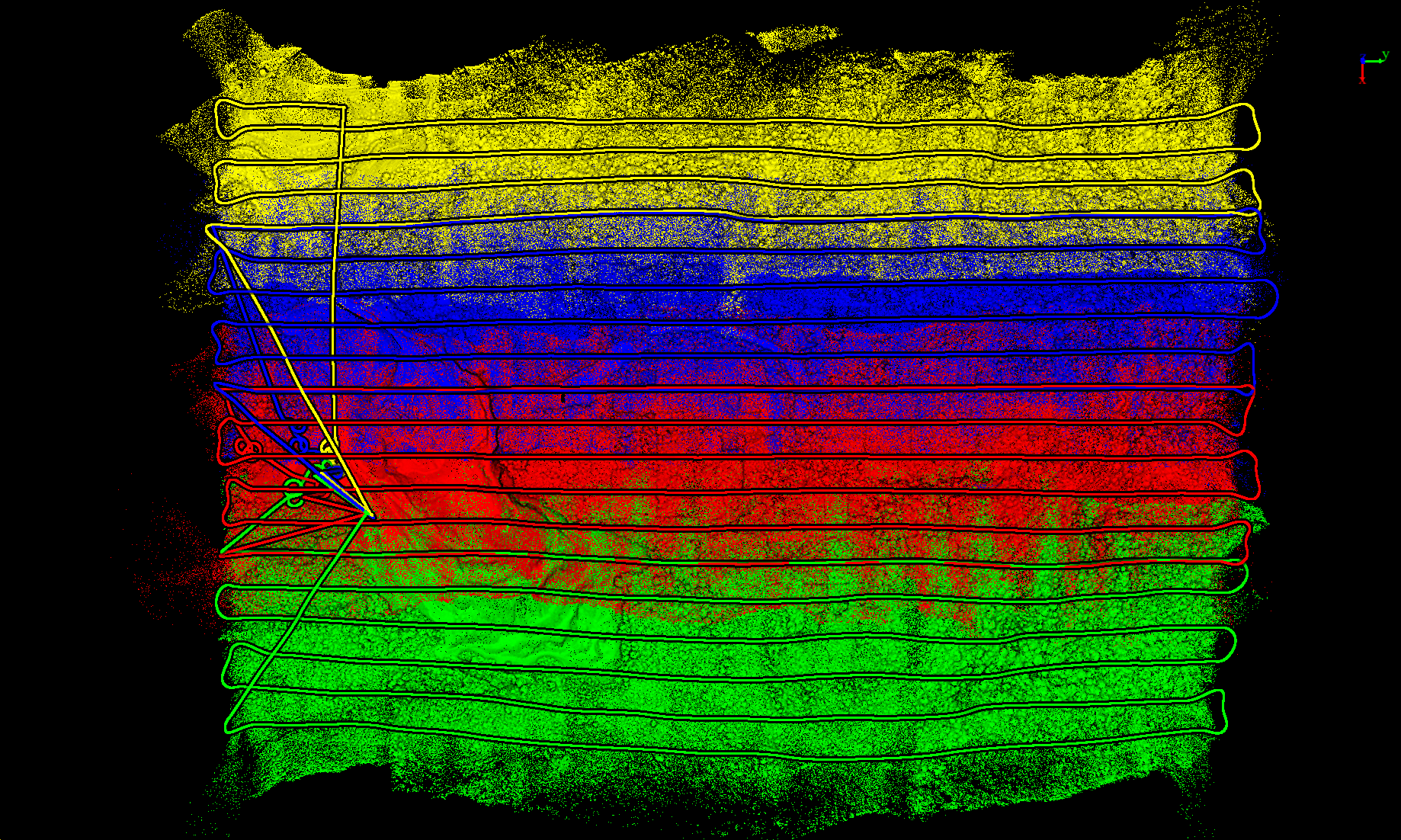 图1 原始点云及其对应轨迹
图1 原始点云及其对应轨迹
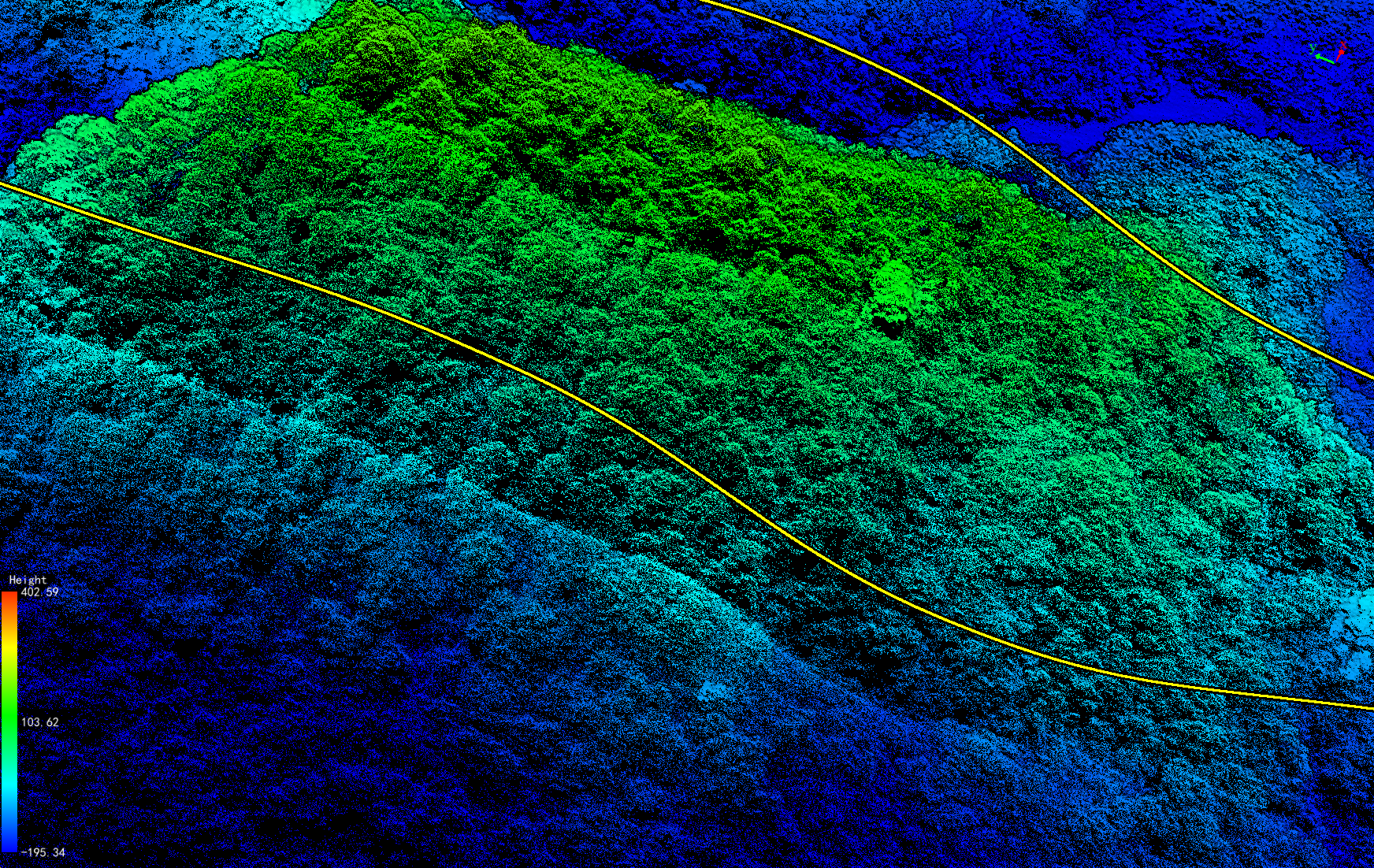
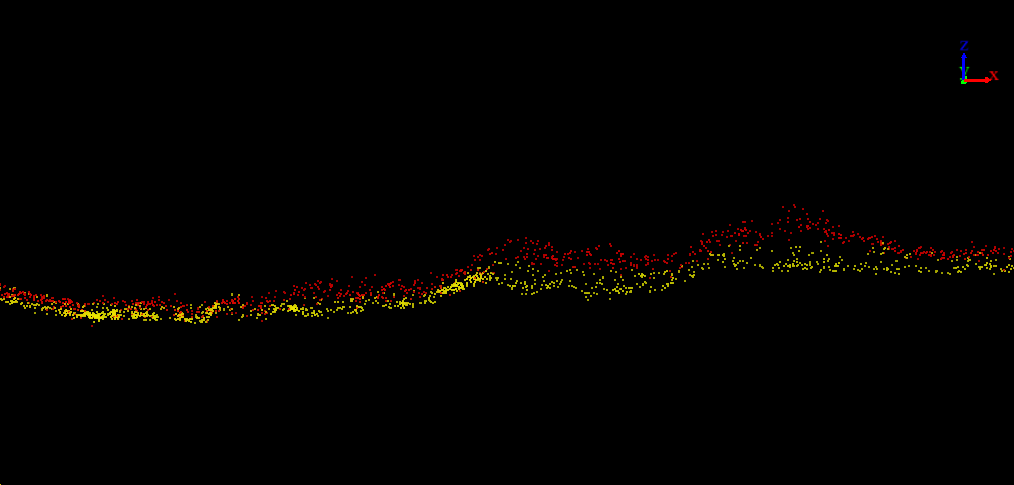 图2 航带重叠区域存在分层现象
图2 航带重叠区域存在分层现象
 图3 完成航带平差的整体数据
图3 完成航带平差的整体数据
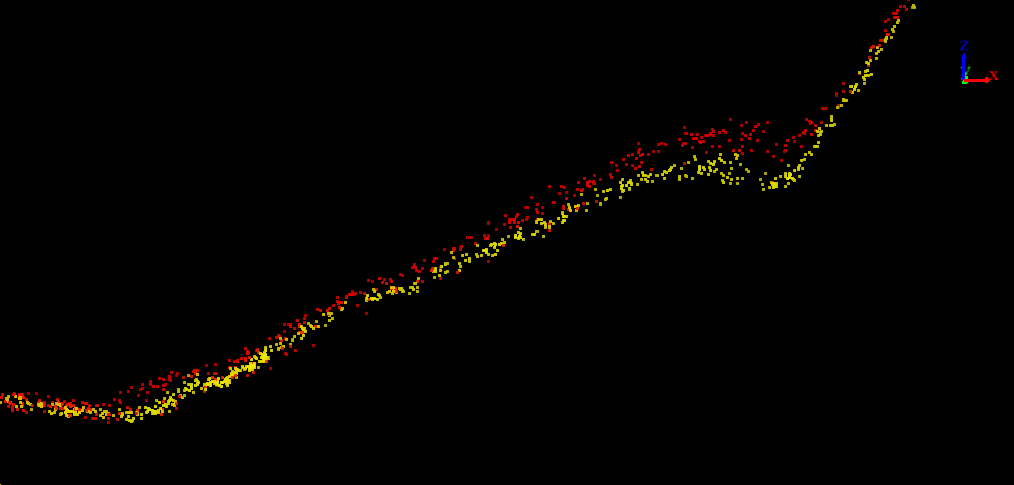
 图4 平差前后航带重叠区域剖面对比图
图4 平差前后航带重叠区域剖面对比图
除航带平差,LiDAR360还具备ICP/手动配准、去噪、拼接、坐标转换等多种功能,支持点云数据预处理全流程。经过一系列预处理流程的数据成果形态美观,如下图所示。
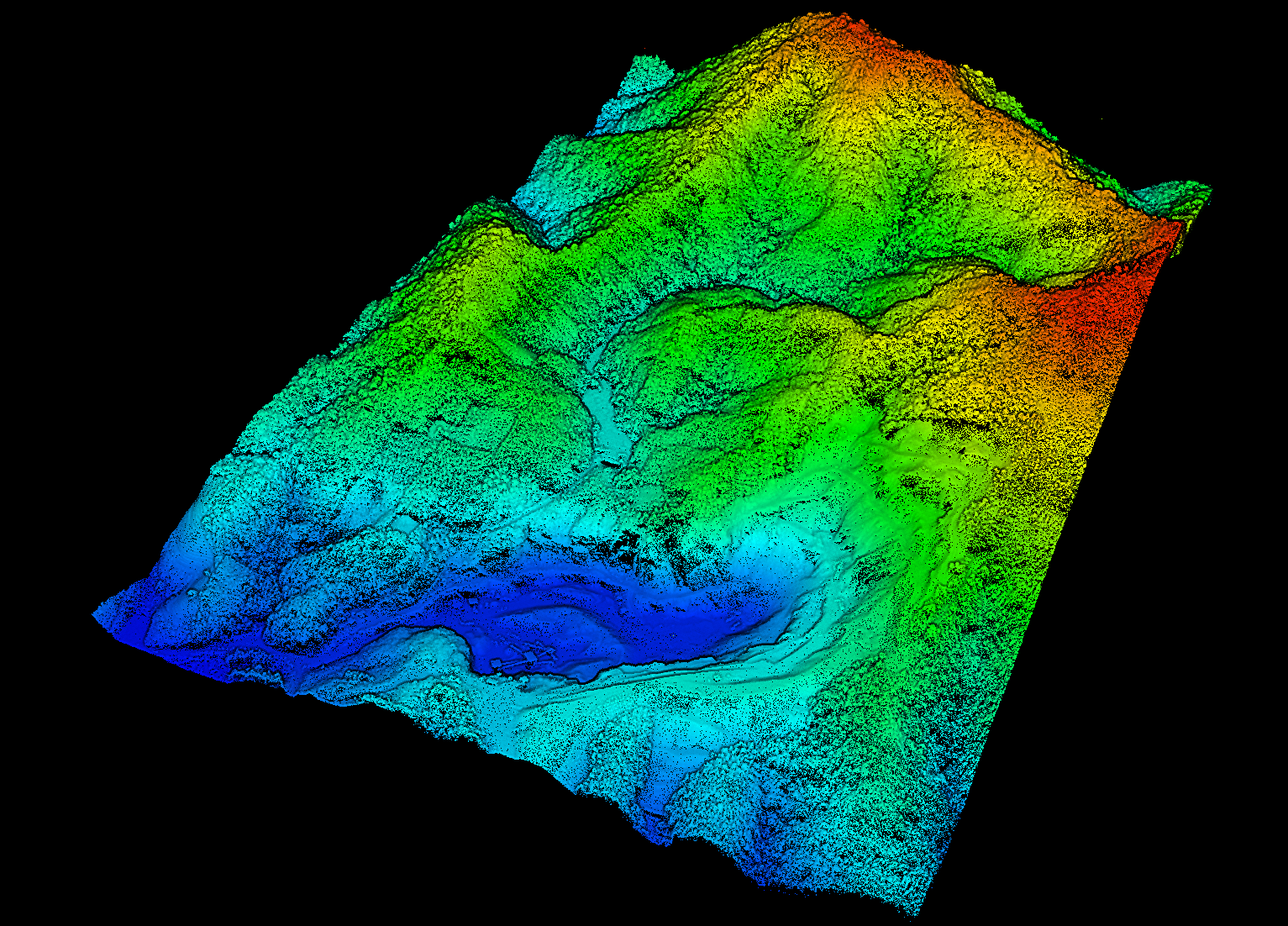 图5 预处理数据成果
图5 预处理数据成果
 表1 航带平差前后点云数据精度对比表
表1 航带平差前后点云数据精度对比表