
激光雷达获取的点云具有三维坐标(X,Y,Z),一般情况,将点投影到平面(通常XY)后,使用平面密度来表示点云密度。该值反映了激光脚点空间分布的特点及密集程度,而脚点的分布反映了地物的空间分布状态特点。
此外,在数据解译分类时,点云密度的作用类似于遥感影像的分辨率。点云密度越大,对微小目标的探测能力越强。
车载LiDAR的点密度值得关注吗?
车载激光雷达扫描系统是许多行业测量制图的利器,例如高精度地图制图、建筑立面测量、城市路政部件普查等。在各种业务场景下,用户都比较关心实际上车作业时,雷达系统最终能带来的数据效果如何,探测能力如何,其中一项重要的指标便是点密度。
但是,过高的点密度有可能会导致数据冗余,体量过大,不便于存储运算。因此选择合适的点密度方案对于我们测量制图是很重要的。
如何计算点密度?
以下就以车载机械旋转式多线激光雷达扫描系统为例,分析其在不同参数环境下的点密度计算,用来估算出理论的数据质量,辅助我们选择合适的产品。
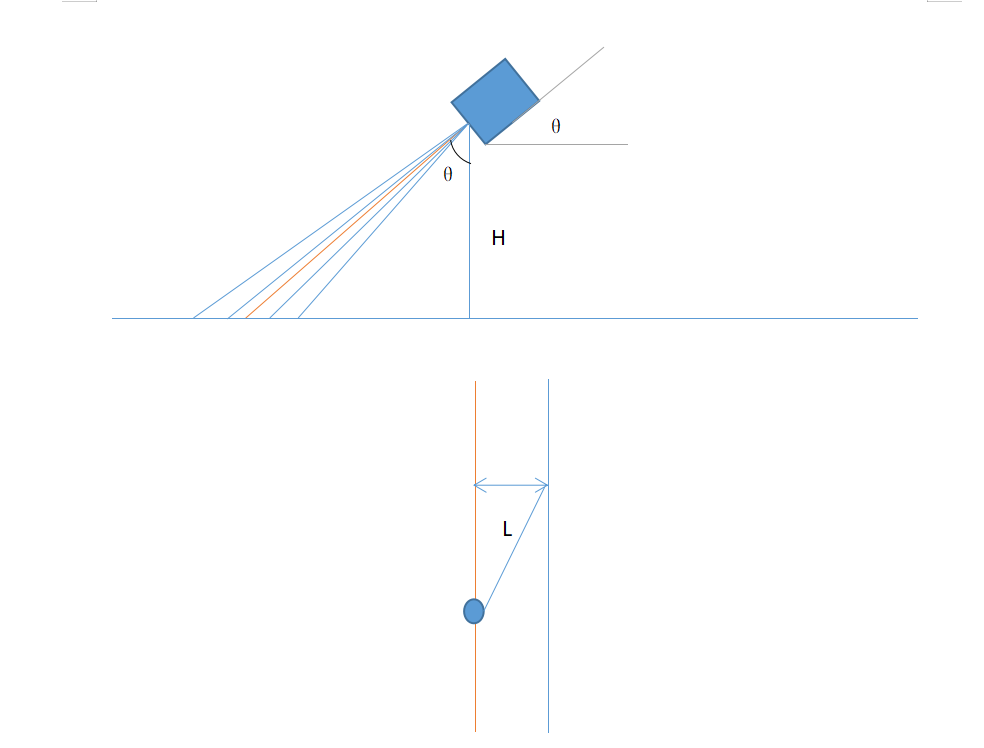
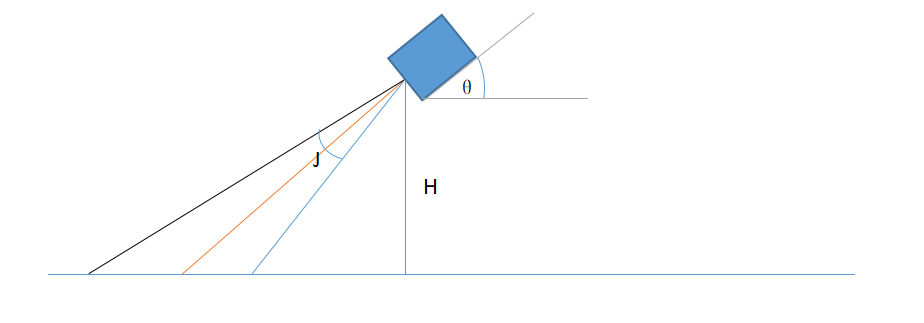
假设激光器安装角度为θ,安装高度为H,点频为A,线束为B,扫描频率为F,垂直视场角为J;车辆速度为V,某点距离激光雷达中心的的垂直偏距为L。
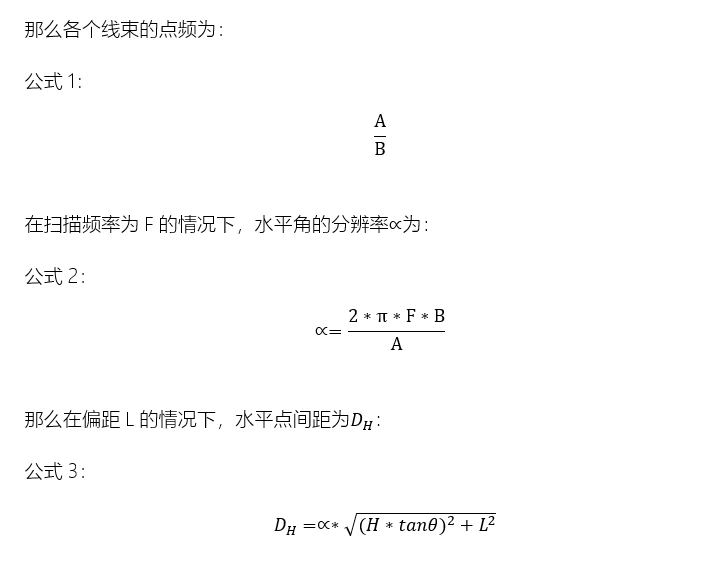
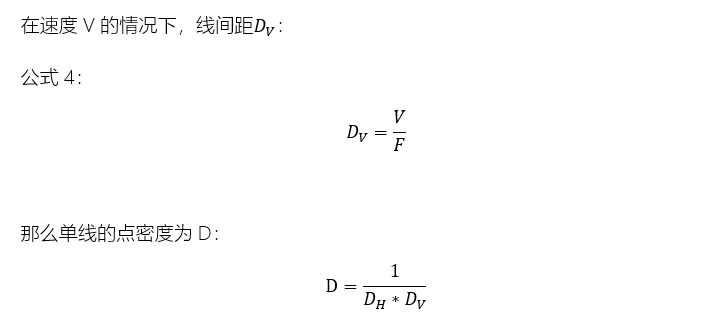
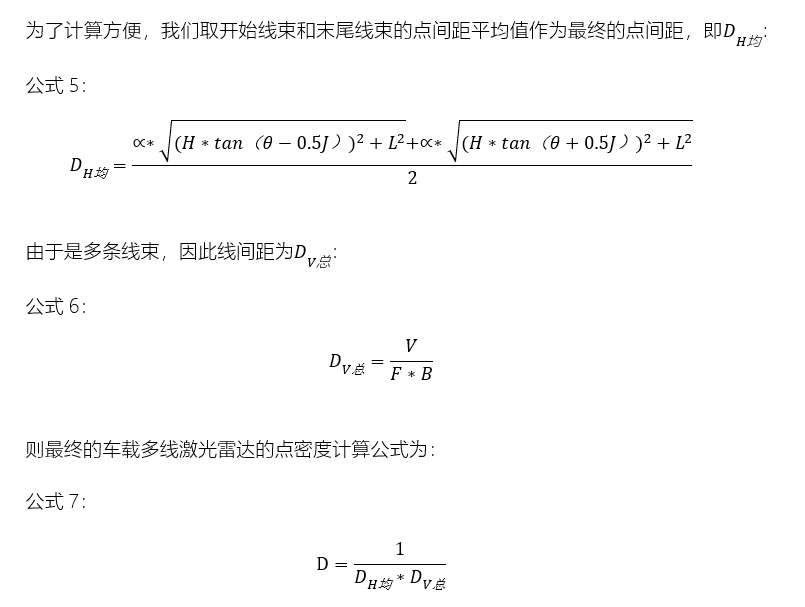
多线的情况下
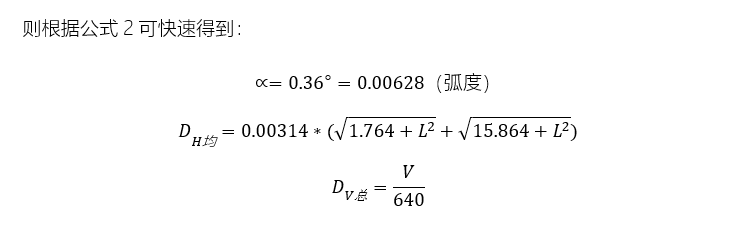
实际案例

以数字绿土的车载激光雷达为例(32线激光雷达,点频64W点/秒,垂直视场角为31°,扫描频率20HZ,安装角为45°,安装高度为2.3m)。
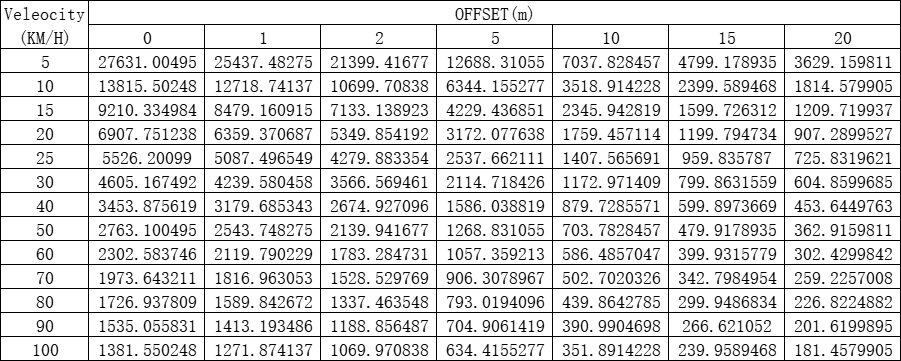 点云密度表
点云密度表
以上点密度计算公式均为手工分析运算,如有错误请指正。