
数字孪生需求新方案
传统的巷道测量采用全站仪、RTK等进行导线测量、碎部测量,以巷道二维平面图、断面图等为主要成果。工作效率有限,成果的可视化程度存在提升空间。
而三维模型能够更全面、更直观地展示巷道的形态特征,包括平面布局、断面形态、高程变化等。使用激光雷达等高精度测量技术,则能够更精细地获取巷道的结构信息,辅助巷道施工、形变监测等业务。为矿山管理和决策提供了更全面、直观地依据,对提升矿山生产的安全、效率等具有重要意义。
近年来,各部委出台了多项政策,对智慧矿山、矿山数字孪生建设提出了要求,给予了支持。对此,数字绿土也为行业的先行者们提供了支持——基于激光雷达的环境快速感知+快速自动建模解决方案。
而使用LiGrip手持激光雷达进行采集,仅需1人即可开工,20分钟完成采集,30分钟完成解算,便能获取毫米级分辨率的,完整的巷道点云!
成果数据可在LiDAR360软件中一键去噪、提取巷道壁,15秒即可完成自动建模,数分钟即可输出成果!
模型可输出为obj等通用格式,与智慧矿山、矿山数字孪生等应用紧密相连,带给行业用户真正的价值!
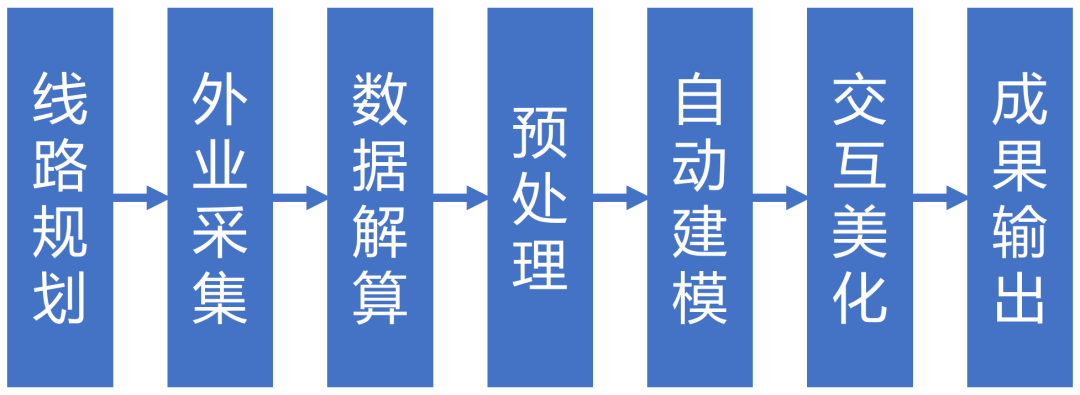 一站式矿山数字孪生方案全流程
一站式矿山数字孪生方案全流程
数字绿土使用LiGrip快速采集外业数据+LiDAR360自动构建三维模型,相较于传统方法具有精度高,效率高,三维特征成果丰富等诸多优势。
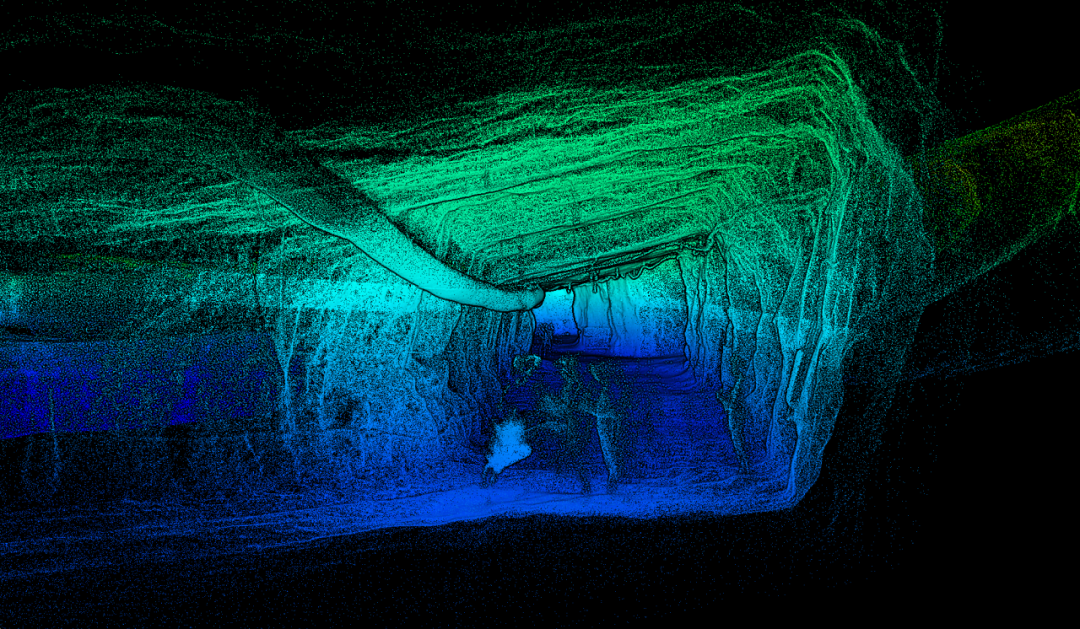 原始点云
原始点云
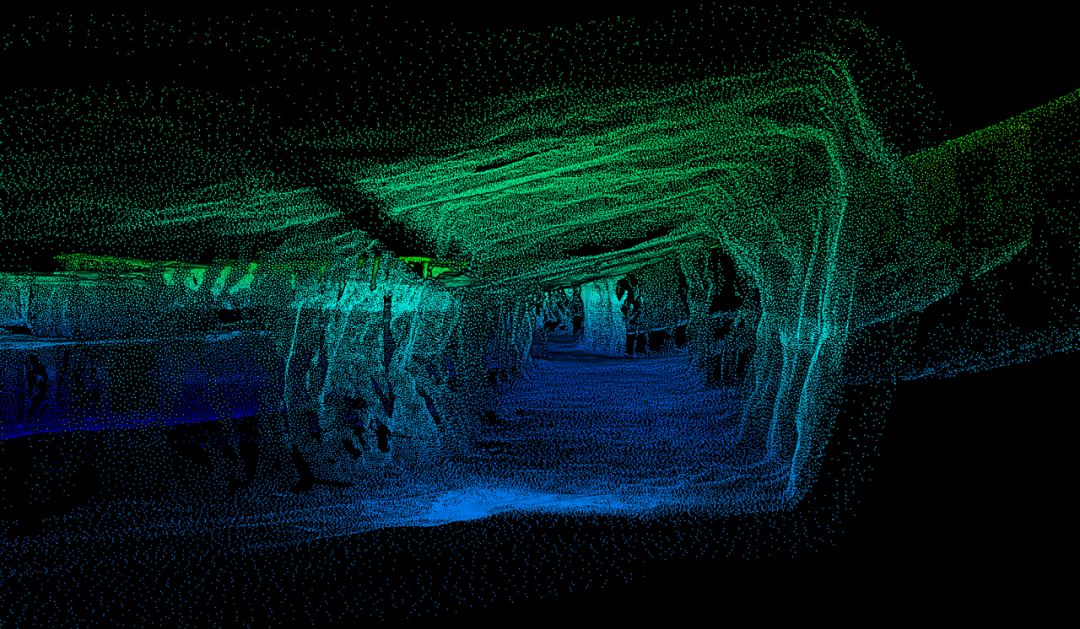 预处理成果
预处理成果
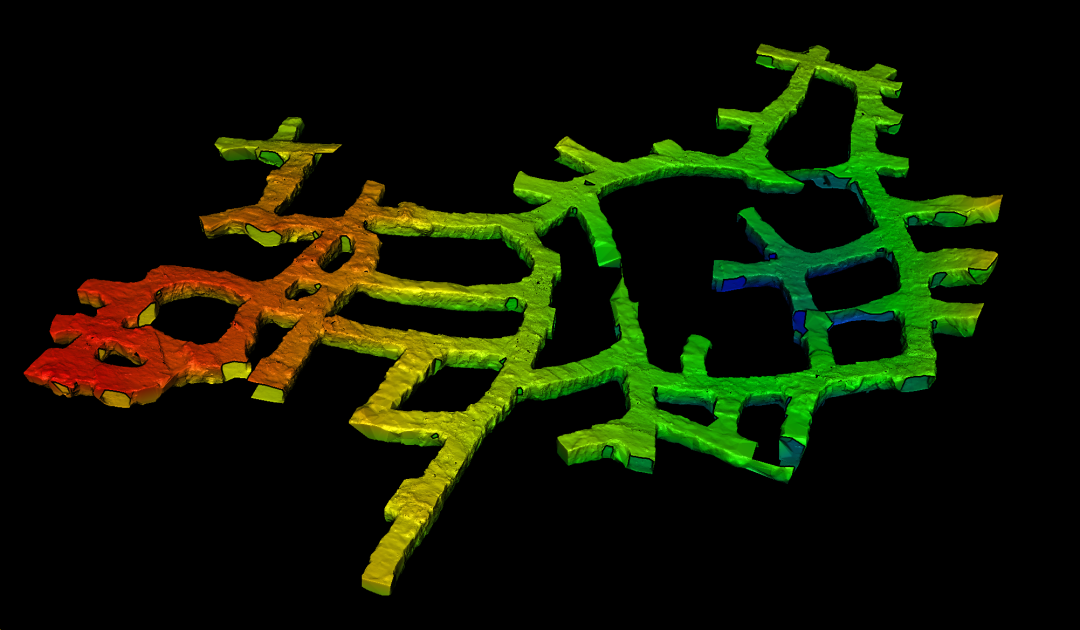
案例实测数据巷道总长度约1000米,在LiDAR360中一键自动建模,仅耗时15秒。巷道内部结构清晰,无噪点。
在对巷道进行建模时,由于管道、机电设备的遮挡,通常无法采集到完整的巷道壁数据,在提取巷道壁进行建模时,模型上通常会存在空洞。对于该痛点,LiDAR360提供了一键补洞功能,可快速自动填补模型上的空洞!(视频速度即软件实际运行速度)
 半自动修整:一键补洞
半自动修整:一键补洞
此外,LiDAR360还提供了20余种模型交互、半自动编辑工具,帮助用户对巷道的形态进行修整,快速输出理想的成果。

 模型最终成果图
模型最终成果图
经验证,模型精度较高,与对应位置的点云偏差集中在厘米以内,结合硬件可实现矿山空间三维信息的高精度重建,为精准分析、管理提供数据支持。

快速构建的巷道三维模型还可在LiDAR360中计算体积用于回填分析,结合断面分析功能辅助智能掘进,为矿山数字孪生建设,及相关行业应用应用提供高效支持!
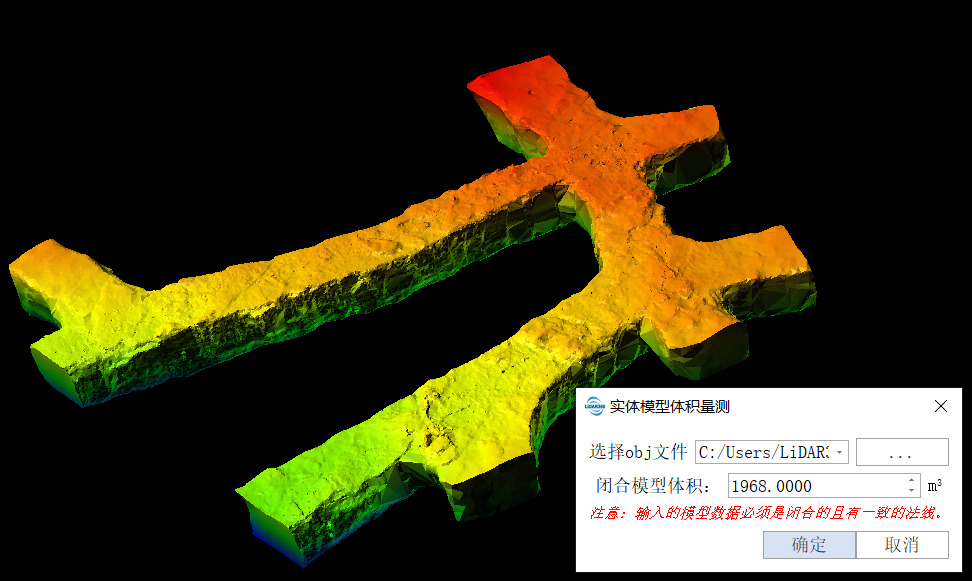 巷道体积计算
巷道体积计算
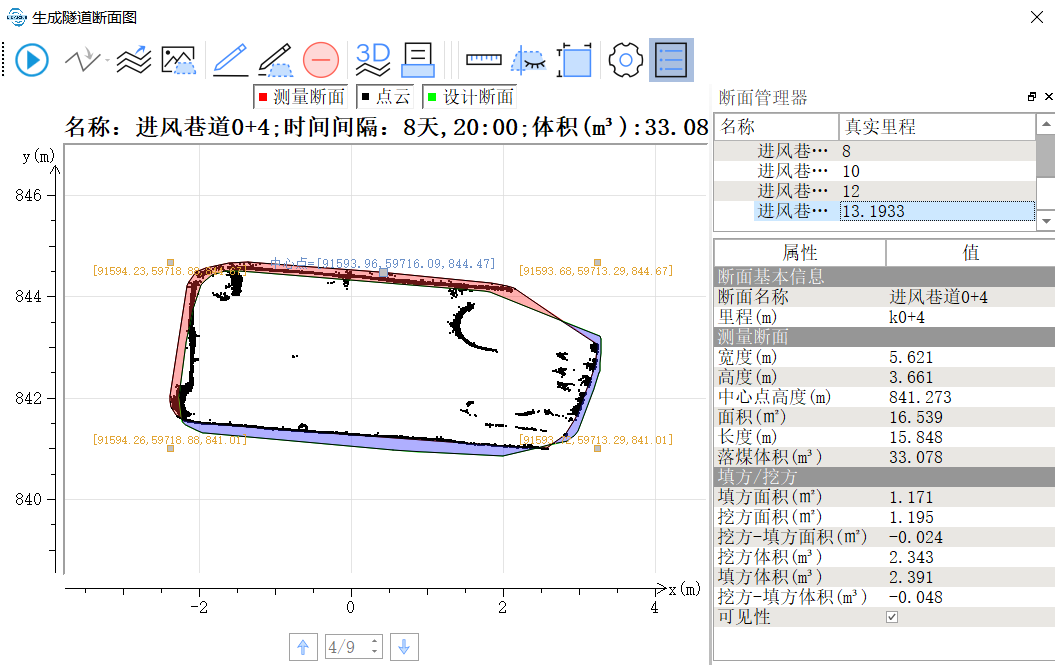 断面分析
断面分析