首页
产品
硬件产品
LiAir 无人机激光雷达扫描系统
LiGrip 手持旋转激光扫描仪
LiMobile 车载移动激光扫描系统
LiBackpack 背包激光雷达扫描系统
LiCrop 表型数据采集系统
软件产品
LiDAR360激光雷达点云数据处理分析软件
LiDAR360 MLS 三维要素智能提取与分析软件
LiPowerline 激光雷达电力巡线软件
LiPlant 表型数据处理软件
LiCloud三维数据服务一站式软件
服务与售后
云服务
在线报价
售后支持
贴吧
绿土小课堂
解决方案
电力巡检
智慧农林
地形测绘
高精地图
勘灾应急
数字城市
新闻中心
公司动态
产品动态
市场活动
国际动态
关于我们
公司介绍
荣誉资质
合作伙伴
代理商
招贤纳士
解决方案 | 变电站无人化全自主精细化巡检解决方案
前言
在变电站的巡检中,无人机技术因其灵活性和高效性而受到广泛关注。但由于变电站环境复杂、设备多、安全性要求高等特点,无人机巡检仍然面临着一系列挑战。为应对这些挑战,工作人员需要对变电站站内设备及周围环境进行详尽勘测,使用地面/无人机激光雷达采集手段,进行站内设备及环境1:1数字化还原,构建高精度三维点云模型,为无人机自主巡检航线规划提供精准的数据依据,为实现变电站无人化全自主飞行巡检提供助力。
解决方案
激光雷达技术具有采集效率高、数据获取范围广、数据精度高、易操作等特点,利用激光雷达采集变电站高精度点云数据,建立三维模型,支撑航迹点和航线的规划与生成,从而满足无人机巡检任务需求。
硬件设备选择
针对变电站实际工况,可采用数字绿土LiBackpack 背包/LiGrip 手持旋转激光扫描仪和LiAir 无人机激光雷达扫描系统相结合的方式进行激光点云数据获取。对于位置较低的区域,采用背包或者手持激光扫描设备进行激光点云数据扫描,而对于分布位置较高的区域,可利用多旋翼无人机搭载激光雷达进行数据补充获取。
软件设备选择
LiPowerline是数字绿土自主研发的激光雷达电力巡线软件,针对输变配一体化场景,通过对海量点云数据的处理分析,在输电业务应用场景:可快速精准提取电力通道内的隐患目标信息,同时具备模拟工况预警分析、线路竣工验收、多期数据分析等功能;在变电业务应用场景:也具备
精细巡检航线规划
功能,
为无人机自主巡检提供航线数据
,保障电力安全稳定运行。
LiPowerline软件
作业流程
通过激光雷达技术进行变电站航线时,主要分为四个步骤——
作业流程
1.点云采集
变电站点云采集过程主要分为:场地勘察、路线规划、扫描作业。由于激光点云数据关系到后续变电站三维建模及航线规划精度,因此对变电站点云数据采集需要遵循相关采集要求,以保证点云数据质量。
变电站激光点云采集
2.点云处理
对变电站三维激光点云数据,进行激光点云去噪、纠偏、复核等预处理及精度校正操作,建立变电站高精度三维激光点云模型。
点云去噪处理
高精度点云模型
3.航线规划
将处理后的点云数据,导入数字绿土LiPowerline软件进行无人机航线规划,包括
添加部件点
、
生成航线
、
编辑航点
、
安全性检查
等主要操作,航线生成遵循变电站无人机飞行巡检拍照的相关要求以及安全飞行的相关规定,综合考虑无人机的飞行特点、作业能力、续航能力等条件,最终完成变电站航线生成,提供高精度的自动飞行航线,供无人机进行自动化飞行巡检作业。
添加部件点
通过添加部件点,指定拍照部位。图中绿点就是部件点。
添加部件点
生成航线
航线生成有4种模式,分别是生成、生成(边界法)、生成(条带法)、连接到主航线。
生成航线
编辑航点
编辑航点,可以调整俯仰角、航偏角、距离、还能查看预览图。
编辑航点
安全性检查
安全性检查主要包括避障距离、航点之间距离和航点下方距离三种检查。
安全性检查
4.无人机巡检
航线生成后,自动上传同步到一体化智能调度平台中,通过一体化智能调度平台在线派发作业工单和自主巡检航线至固定机巢,机巢内无人机根据接收任务,基于航线自动完成巡航任务,巡检成果自动回传至智能调度平台中,供巡检人员进行成果查看和缺陷判别。
无人机自主巡检作业
精细化巡检成果照片
方案总结
通过激光雷达技术对变电站进行高精度数字化点云建模,进而基于高精度点云模型,使用Lipowerline软件进行无人机自主巡检所需航线快速规划及安全分析,有效解决了无人机在变电站内自主飞行起降安全、拍摄距离及焦距控制、巡检飞行线路安全等问题,为变电站无人机自动化、智能化、高效化及安全化巡检提供了有力的保障。
收藏
菜单

 LiPowerline软件
LiPowerline软件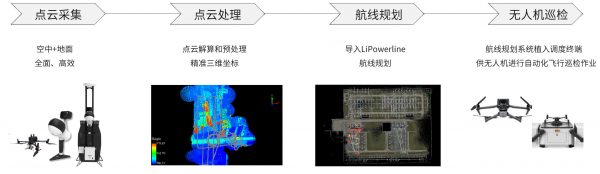 作业流程
作业流程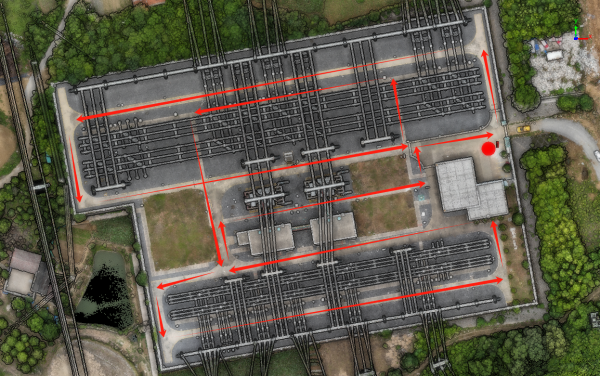 变电站激光点云采集
变电站激光点云采集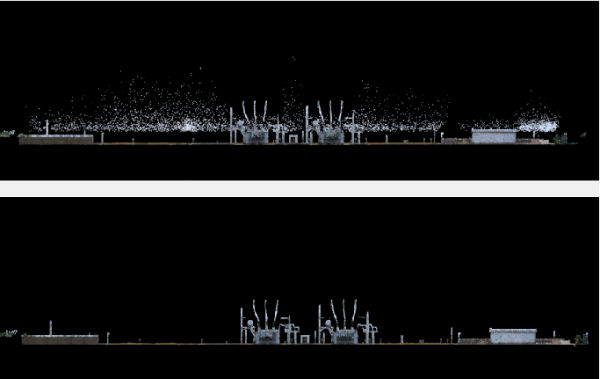 点云去噪处理
点云去噪处理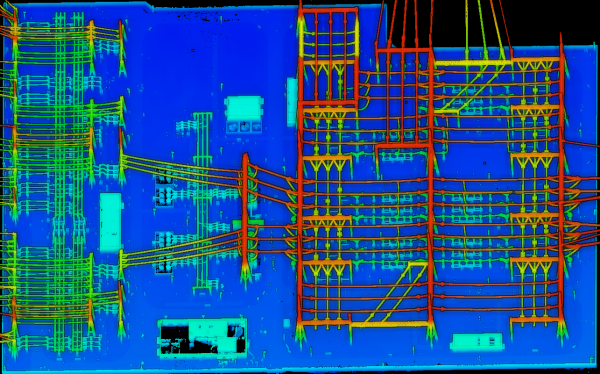 高精度点云模型
高精度点云模型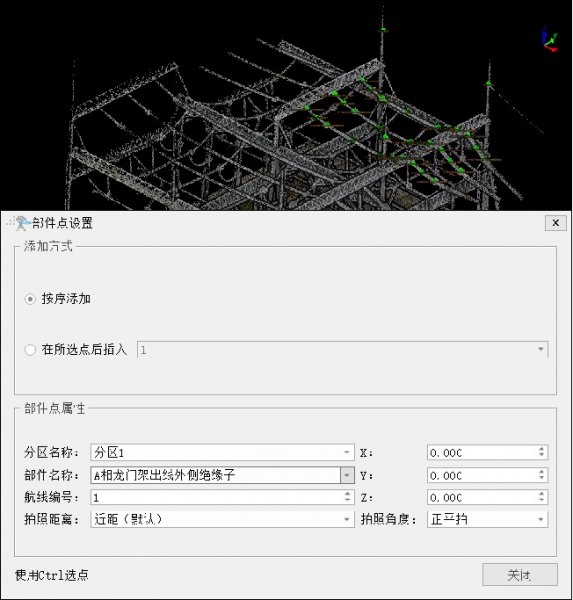 添加部件点
添加部件点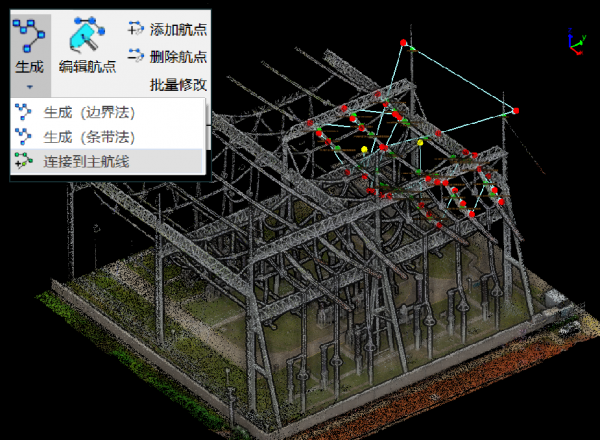 生成航线
生成航线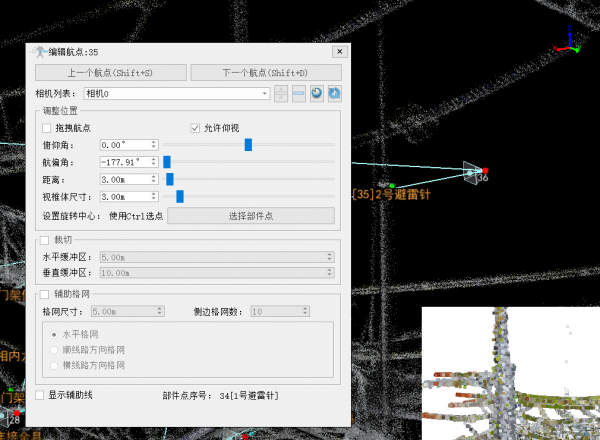 编辑航点
编辑航点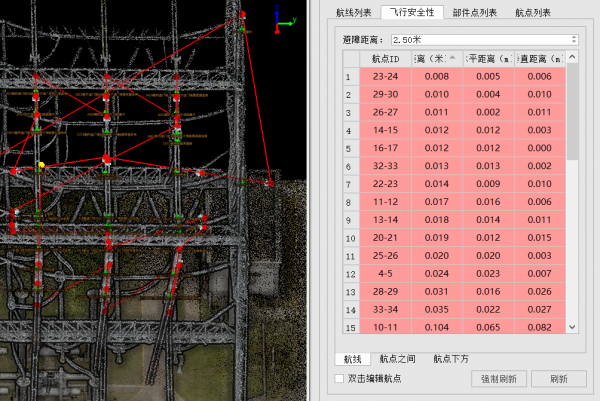 安全性检查
安全性检查 无人机自主巡检作业
无人机自主巡检作业 精细化巡检成果照片
精细化巡检成果照片 LiPowerline软件作业流程变电站激光点云采集点云去噪处理高精度点云模型添加部件点生成航线编辑航点安全性检查无人机自主巡检作业精细化巡检成果照片
LiPowerline软件作业流程变电站激光点云采集点云去噪处理高精度点云模型添加部件点生成航线编辑航点安全性检查无人机自主巡检作业精细化巡检成果照片