
目前,GPS+IMU组合导航几乎是主流移动测图系统的标配,这些系统在GPS信号失锁的情况很难有效工作。SLAM技术可以克服上述不足,同时还能降低三维测图系统整体成本。将SLAM技术应用于移动测量已成为国际上的研究热点,在现代三维测绘、无人驾驶和智能机器人领域具有广泛需求。
LiBackpack是北京数字绿土科技有限公司自主研发的室内外一体化激光雷达扫描系统,结合激光雷达和SLAM技术,无需GPS即可实时获取高精度点云数据。轻巧的设计使得LiBackpack既可以手持或背包使用,也可搭载于汽车和飞机等平台进行使用。在建筑BIM、林业资源调查、交通设施监测、隧道测量、文化遗产保护与考古、数字矿山、电力巡线、水电工程、执法取证等领域具有广泛的应用前景。

LiBackpack传感器参数(可选Velodyne VLP-16或Velodyne HDL-32E):
LiBackpack技术优势
- 高精度
结合激光雷达和SLAM算法实现室内外一体化移动测量,无需GPS定位即可实现厘米级精度。相比固定站方式,省去了搬站、数据拼接等繁琐工作,可对目标进行全方位无死角的扫描。
- 高效率
可选Velodyne VLP-16或Velodyne HDL-32E激光扫描仪,实时获取厘米级高精度三维点云数据。
- 室内外导航
基于激光雷达SLAM技术进行高精度定位,可用于机器人等领域室内外导航避障。
- 低成本
无需高额成本的GPS和惯导,成本大幅度降低。
- 多平台
设计紧凑,方便携带,既可手持或背包使用,也可搭载于飞机、汽车等平台。
- 易操作
自动化程度高,操作简单,开机即用。
LiBackpack应用案例
备注:公司所在中关村软件园园区,数据采集都在园区内地下车库、园区树林、园区室外建筑;阶梯教室和餐厅为公司举办“2016精细地形测绘技术培训班”所在地,为展现更丰富的细节信息,效果图均去除了屋顶等点云数据。
- 室内外一体化测量——地下车库
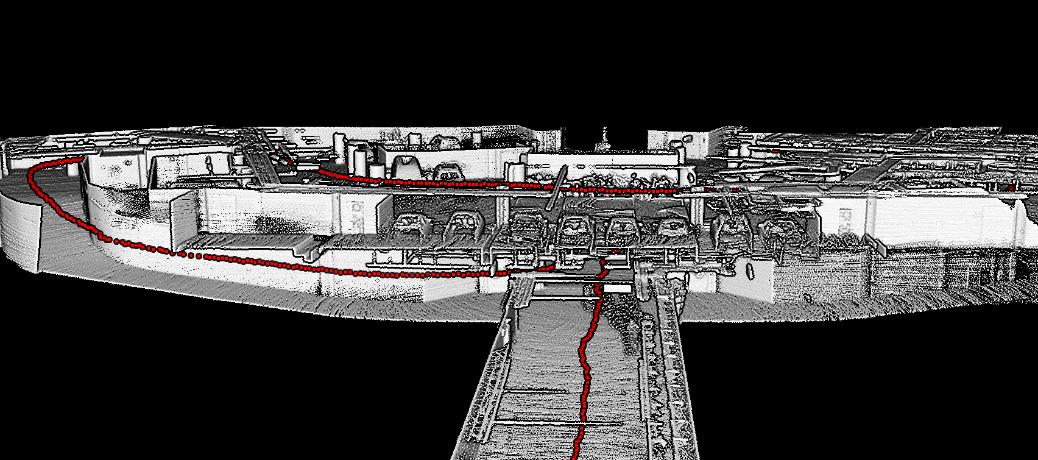
利用LiBackpack平台仅用450秒即可实现从室外到室内地下车库的高精度扫描,快速还原真实三维场景,可用于地下空间管理和整治等。


公司所在园区地下车库数据采集工作照
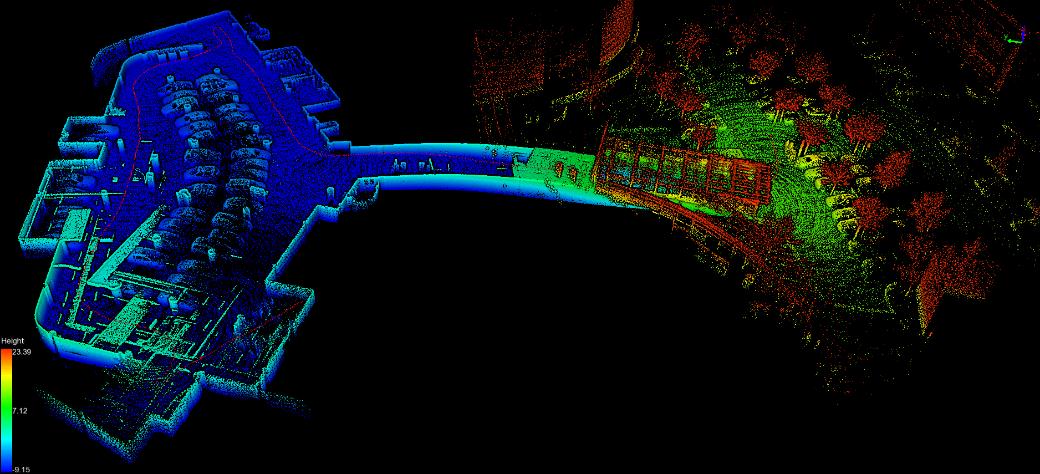
从室外到地下车库一层点云效果图
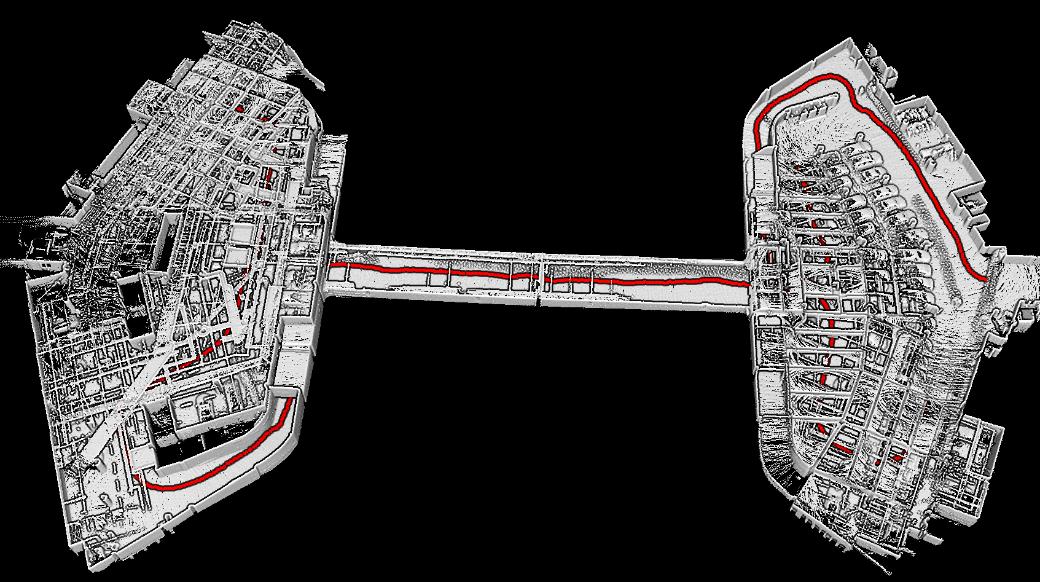
从地下车库A区一层到二层,经过长廊到B区二层,然后再到一层点云效果图
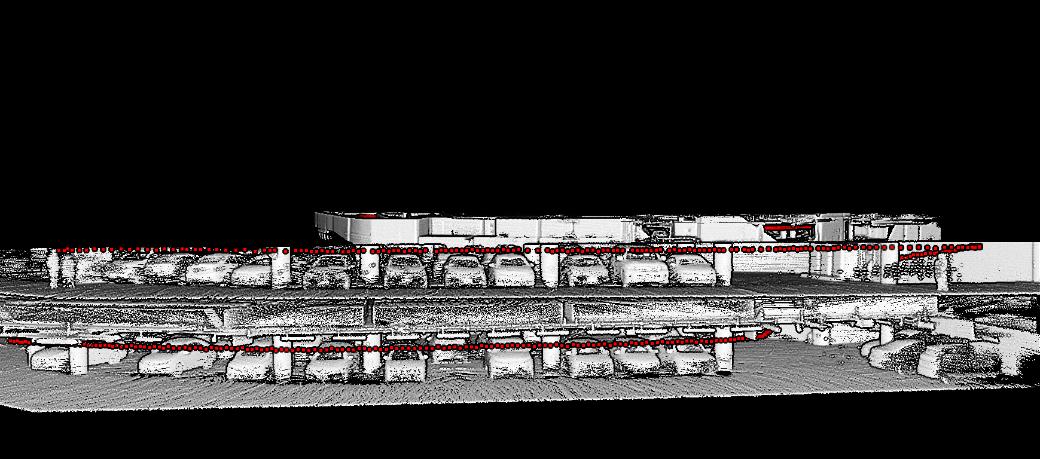
局部效果图1
局部效果图2
2)室内测量
利用LiBackpack可快速获取室内三维点云数据,且细节信息丰富,可用于室内环境高精度建模及设施管理等。
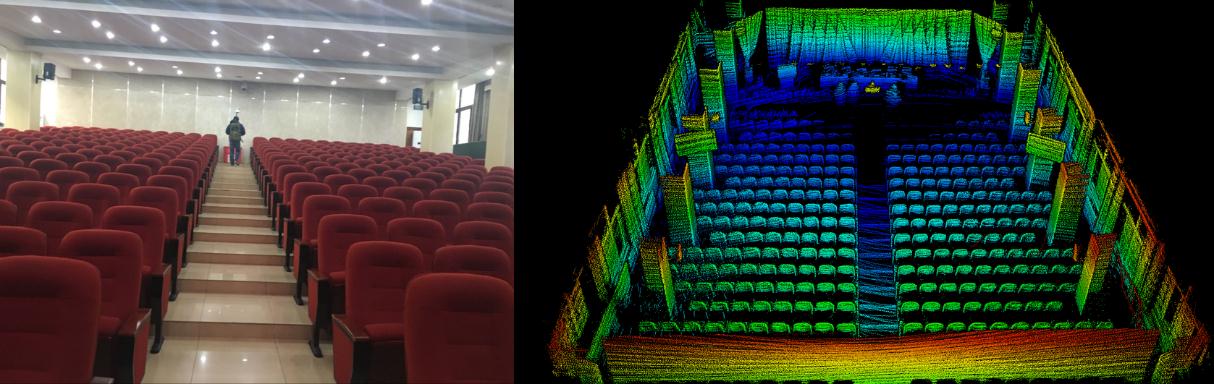
培训场地阶梯教室扫描效果图
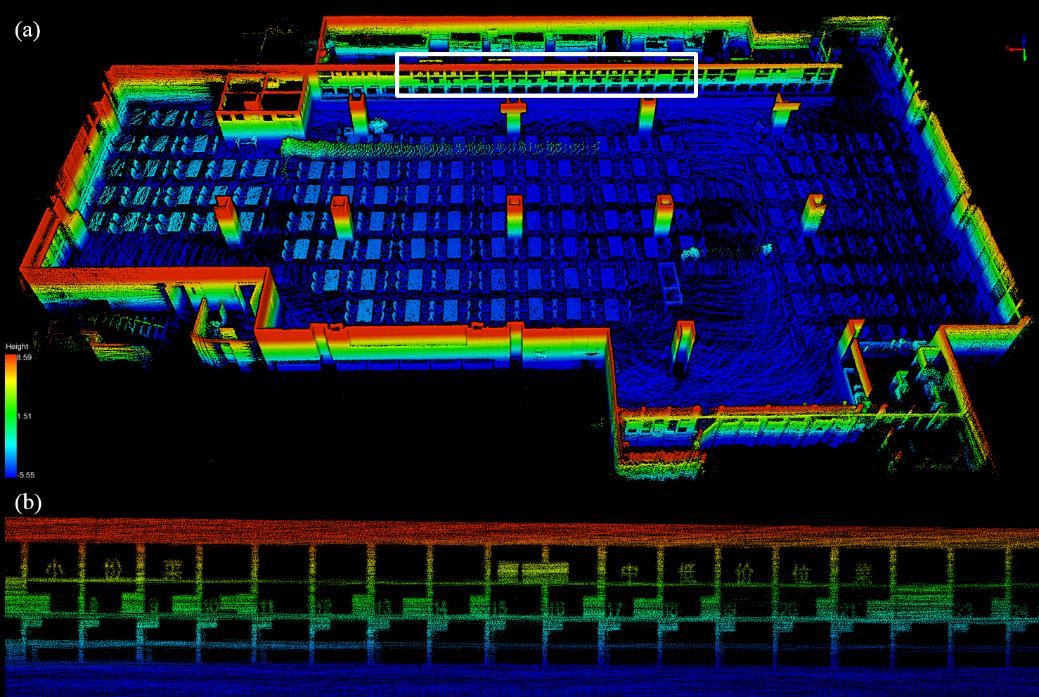
(a) 培训场地餐厅整体效果图,(b) 局部细节图
3)室外测量
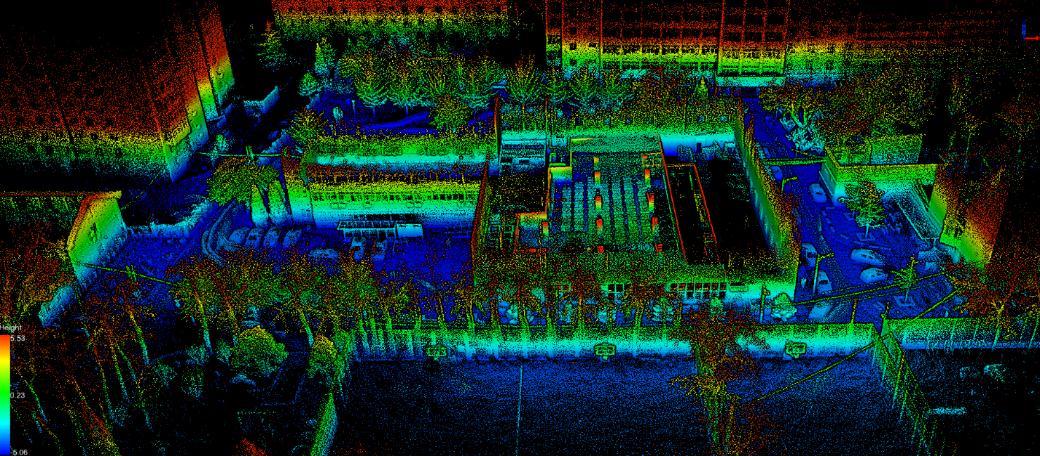
- 林业调查
LiBackpack不依赖GPS信号,可在茂密林区获取精细的点云数据,用于林分结构参数提取,如胸径、树木枝干结构等,是对机载激光雷达数据的重要补充。
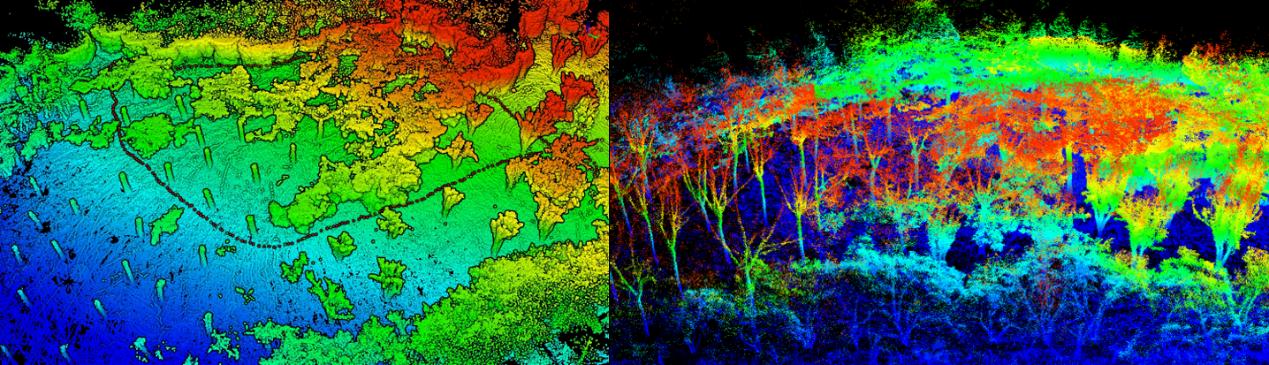
公司所在园区树林扫描效果图
- 建筑物
LiBackpack可获取室内外建筑物三维点云数据,用户可以基于采集的数据进行漫游、量测、二维平面设计图和三维模型生成等,用于BIM、绘图更新、竣工测量等。
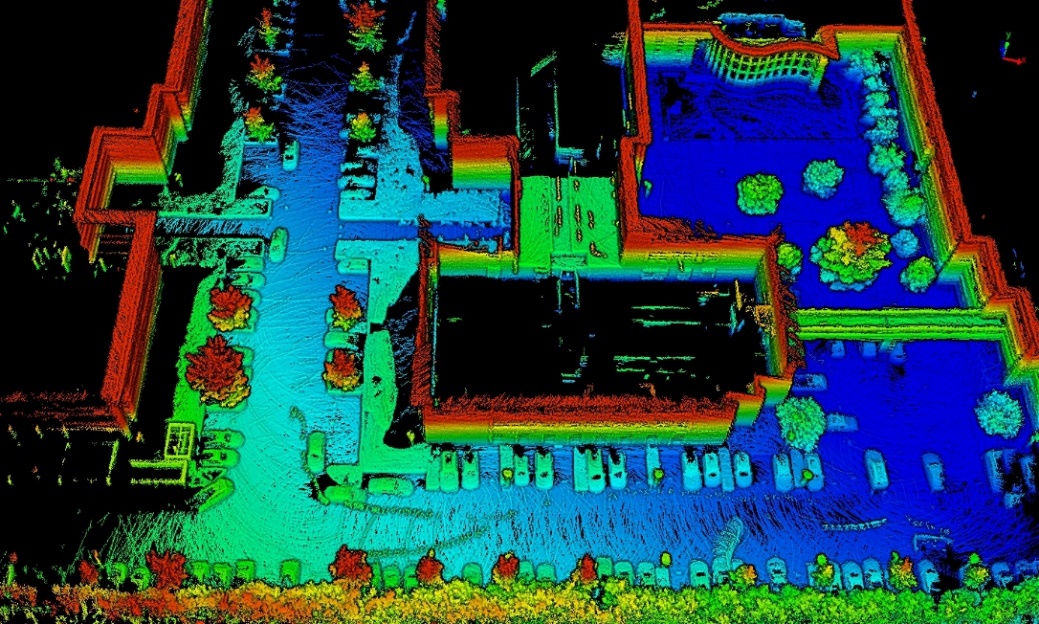
公司所在园区建筑物扫描效果图
培训场地教学楼扫描效果图