
LiBackpack是由数字绿土自主研发的背包式室内外一体化激光雷达扫描系统,结合激光雷达和同步定位与地图构建(SLAM)技术,无需GPS(GNSS)即可实时获取周围环境的高精度三维点云数据。可用于室内外一体化测量、地下空间信息获取、隧道工程、数字工厂、数字矿山、林业资源普查、 BIM、建筑立面测量等领域。
技术优势:
易操作:自动化程度高,开机即用
低成本:无需GPS,成本大幅度降低
高精度:结合激光雷达和SLAM算法实现室内外一体化测量,无需GNSS信号即可实现厘米级数据精度
查看简洁方便:数据在手机、平板等移动端实时显示;支持无线/有线方式查看数据;数据传输稳定性强,边采集边查看
高效率:实时显示高精度点云数据、支持在线闭环以及闭环优化,扫描完成即可导出采集点云数据和运动轨迹
多平台:设计轻巧便捷,可搭载不同的移动平台,无论是手持、步行、骑行、车载都可以轻松采集数据
| 系统参数 | |||
| 尺寸(mm) | 975 X 335.8 X 102.9 | 电池 | 5700mAh |
| 重量 | 6.3kg/5.8kg | 工作时间 | ~2h(一块电池) |
| 功率 | 76W / 60W | 端口 | HDMI,USB,网口 |
| 电压 | 22.8V | 存储 | 512G SSD |
| 电流 | 1.9A | 适用环境 | 室内和室外 |
| 控制及显示 | 网络控制和显示(手机、平板电脑);有线数据传输(平板电脑) | ||
| 传感器参数 | |
| LiDAR 传感器 | HDL32E / VLP16 |
| LiDAR精度 | ±2cm/±3cm |
| 垂直视场角 | -10°~30°/-15°~15° |
| 测量范围 | 120m/ 100m |
| 数据成果 | |
| 数据精度 | ~ 5cm |
| 点云格式 | las,ply |
LiBackpack应用案例
备注:公司所在中关村软件园园区,数据采集都在园区内地下车库、园区树林、园区室外建筑;餐厅为公司举办“2016精细地形测绘技术培训班”所在地,为展现更丰富的细节信息,效果图均去除了屋顶等点云数据。
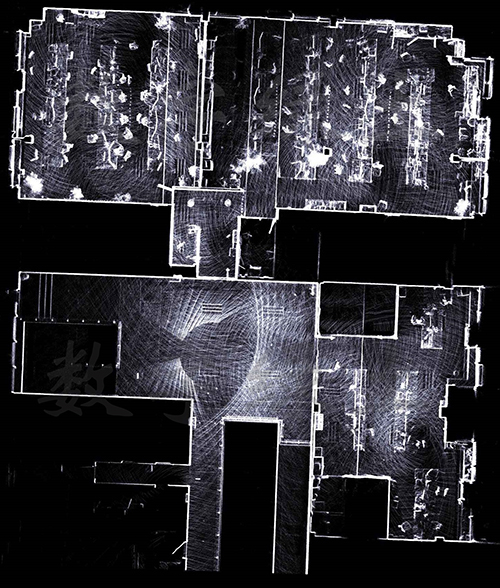
1)室内外一体化测量——地下车库
利用LiBackpack平台仅用450秒即可实现从室外到室内地下车库的高精度扫描,快速还原真实三维场景,可用于地下空间管理和整治等。
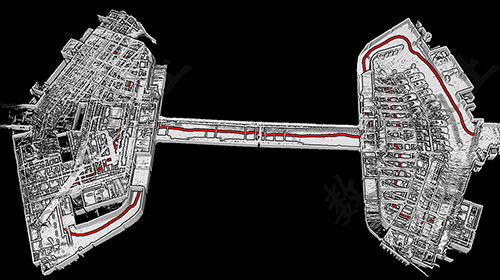
从地下车库A区一层到二层,经过长廊到B区二层,然后再到一层点云效果图
2)室内测量
利用LiBackpack可快速获取室内三维点云数据,且细节信息丰富,可用于室内环境高精度建模及设施管理等。
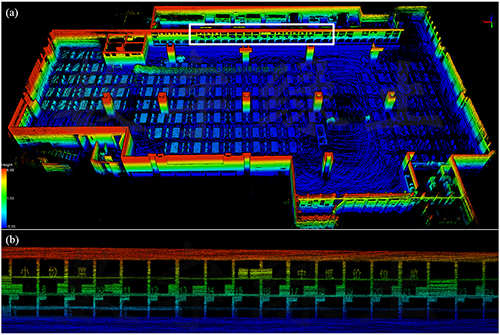
(a) 培训场地餐厅整体效果图,(b) 局部细节图
3)室外测量
- 林业调查
LiBackpack不依赖GPS信号,可在茂密林区获取精细的点云数据,用于林分结构参数提取,如胸径、树木枝干结构等,是对机载激光雷达数据的重要补充。
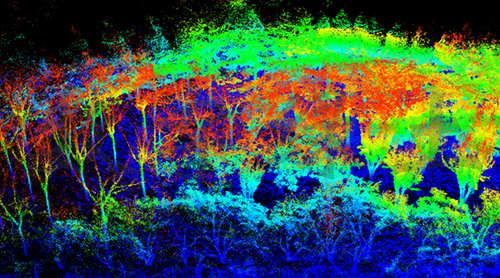
公司所在园区树林扫描效果图
- 建筑物
LiBackpack可获取室内外建筑物三维点云数据,用户可以基于采集的数据进行漫游、量测、二维平面设计图和三维模型生成等,用于BIM、绘图更新、竣工测量等。
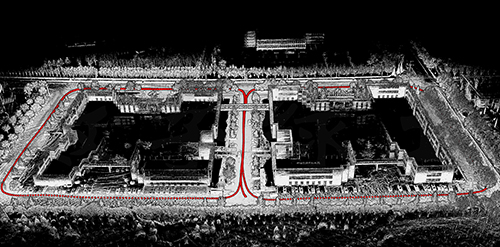
园区2号楼和3号楼
办公室点云效果图