
一、任务概况
LiAir 无人机激光雷达扫描系统采集煤堆表面三维点云数据,利用LiDAR360软件进行煤堆表面模型构建,生成准确的煤堆三维立体模型,并利用此模型进行煤堆体积的计算。
二、设备简介
LiAir 无人机激光雷达扫描系统具有超强的任务载荷,续航以及安全性能,可以实时、动态、大量采集空间点位信息。与被动遥感相比,LiAir能够克服光、云、阴影、树木遮挡等因素影响,获取更高精度的地理空间信息。

三、任务难点
- 黑色煤堆对激光会有吸收;
- 由于进场期间一直处于阴雨天气,雨水对激光有镜面反射,加之煤堆对于激光吸收较强,可能会造成局部区域点云数据缺失;
- 测区位于海边,无人机受到海风影响,造成姿态角变化较大。
四、数据采集情况
- 首先考虑到煤堆体积计算的精度要求,保证每平方米100个点,按照这个要求进行航线的规划。LiAir 无人机激光雷达扫描系统在航高50米的情况下,单条航带的幅宽为130m,考虑到测区呈长700米,宽270米条带状分布,航线规划为两条,重叠度40%。
- 根据详细规划的航线路径,挂载激光雷达设备进行扫描作业。激光雷达数据采集流程包括无线连接激光雷达系统,开启激光雷达IMU单元,完成IMU对准,在地面开启激光雷达数据采集,然后起飞在空中绕八字,当IMU精度达到指定标准之后,然后执行航线,进行测区内的数据采集。
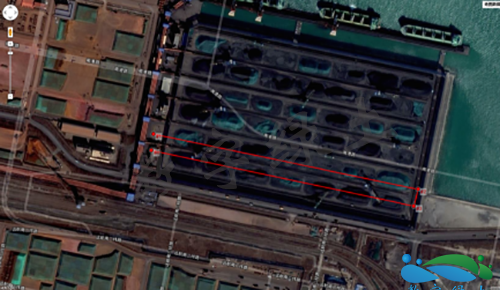
航线设计图
五、数据成果展示
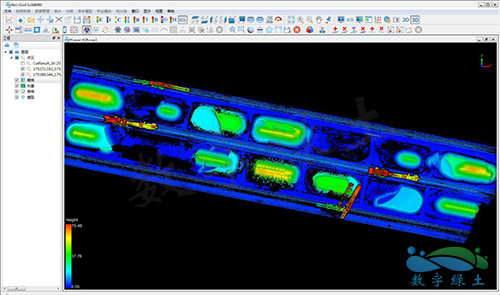
激光点云密度较高,达到130点每平方米。由于采集当天刚下完雨,加之煤堆对激光的吸收,造成部分煤堆局部区域点云缺失。部分煤堆表面有防雨布覆盖,点云完整,点云成果如下:
六、土方量计算
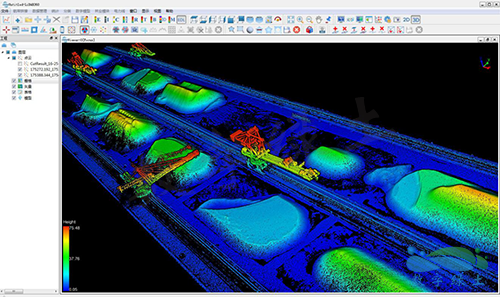
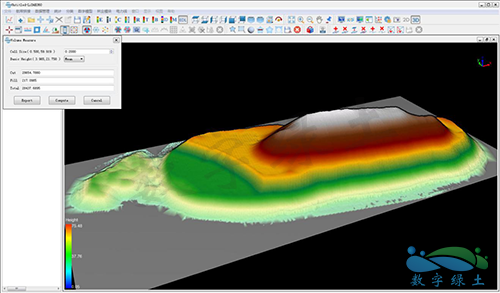
本次项目采用LiDAR360软件采用多次计算取平均值的方式进行体积计算。以006号煤堆为例,点云成果如下所示:
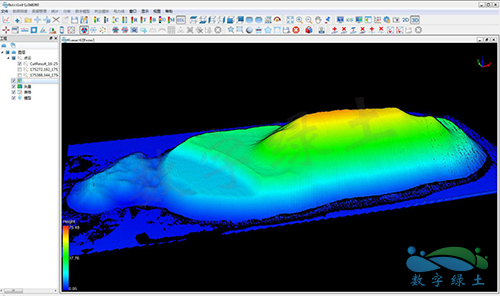
体积计算时,进行表面模型的构建:
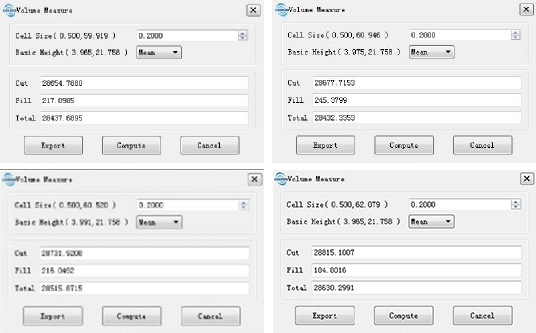
四次计算结果如下所示:
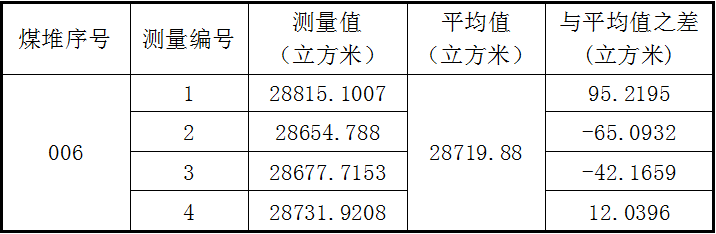
006号煤堆测量结果计算:
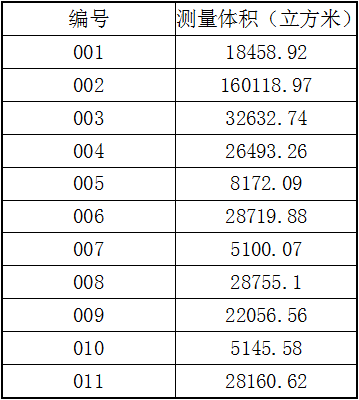
所有煤堆编号分布以及测量结果:
七、成果检查与精度验证:
本次测量煤堆计算方法合理,操作简单,在多次测量取后取均值可一定程度减少人工量取误差。部分煤堆点云缺失,使用LiDAR360体积量测功能,对煤堆形状进行拟合,土方量计算值在误差允许范围内。本次项目根据采集激光雷达数据计算的煤堆的体积方法与精度得到用户的认同。