
在刚刚结束的InterGEO 2017展会上,继LiDAR360V2.0发布之后, LiMapper也迎来更新,版本号升级至2.0。作为一款高效全能的影像处理软件,LiMapper同时支持正射影像及倾斜影像的处理,自动化程度高,处理流程简单,尤其是海量影像数据的处理能力出众,高效的并行处理体系可支持超10000张无人机采集的影像。高度自动化的操作流程以及友好的用户操作界面,使用户无需具备专业遥感或测绘技术背景即可快速上手,大大降低了企业在数据处理环节上的人员培训要求。
新版本亮点如下:
1、数据源更丰富:
- POS数据的导入功能更完善;
2、硬件资源利用更充分:
- 正射拼接模块支持CUDA加速,速度提升5-10倍(具体效果视显卡而定);
3、更稳健的数据处理算法:
- 支持多个数据处理工程同步运行;
- 支持DSM模式下的无POS数据快速拼图;
4、更友好的交互体验:
- 优化三维显示效果,数据显示更流畅,人机交互更友好;
- 优化工程管理功能及拼接线编辑模块,计算效率大幅提高;
- 优化工作区显示逻辑,可支持不同组影像在工作区面板中拆分显示,进一步提高了数据处理的效率;
- 点云属性信息实时显示操作更加便捷,可通过鼠标右键快速显示兴趣点高程等信息;
5、更丰富的成果形式:
- 支持导出DEM/DSM、DOM/TDOM、拼接线、单张正射影像等不同需求的数据成果输出;
- 可通过包围盒灵活划定数据成果输出范围.
LiMapper与Pix4d对比
测试环境:配置为Intel I7 4790K + 32G内存 + NVIDIA GeForce GTX970的台式机。
以下为LiMapper与Pix4d生成中等尺度密集点云的对比结果:
处理时间对比
| 空三时间 | 密集匹配时间 | 拼图时间 | |
| 场景A(影像数量:70;影像大小:4000*3000;相机型号:Canon IXUS 120 IS;控制点数量:12) | |||
| LiMapper | 54秒 | 6分33秒 | 7分52秒 |
| Pix4d | 3分31秒 | 14分37秒 | 34分7秒 |
| 场景B(影像数量:127;影像大小:4000*3000;相机型号:Canon IXUS 200HS;控制点数量:7) | |||
| LiMapper | 1分41秒 | 13分35秒 | 15分19秒 |
| Pix4d | 3分49秒 | 19分31秒 | 45分16秒 |
| 场景C(影像数量:753;影像大小:8256*6192;相机型号:PENTAX 645Z;控制点数量:9) | |||
| LiMapper | 16分钟 | 5.3小时 | 1.9小时 |
| Pix4d | 40分钟 | 10小时 | 4小时 |
密集点云对比
在控制点及非控制点区域,截取点云剖面,进行对比。

控制点分布
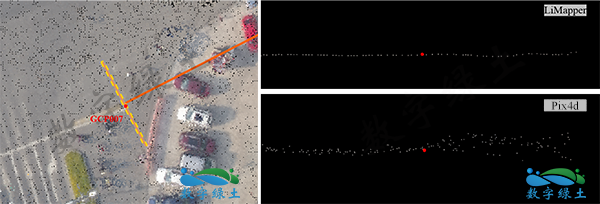
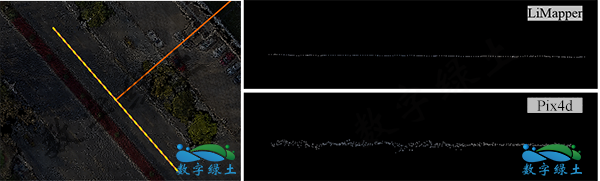
该组数据控制点分布比较均匀,LiMapper生成的密集点云在控制点区域与控制点更接近,在非控制点公路区域二者的点云数据位置相对一致。同时,LiMapper的点云剖面线更接近直线,Pix4d有一定程度位置偏移的噪点。
DSM对比
对DSM整体效果及两个局部区域进行对比,效果如下:
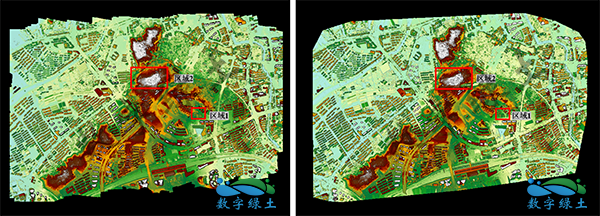
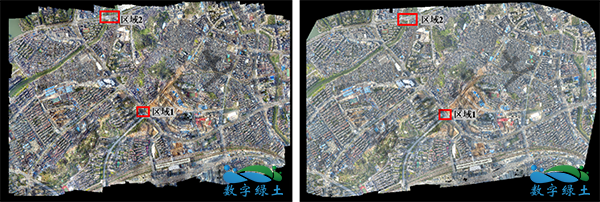
DSM整体效果(左:LiMapper 右:Pix4d)
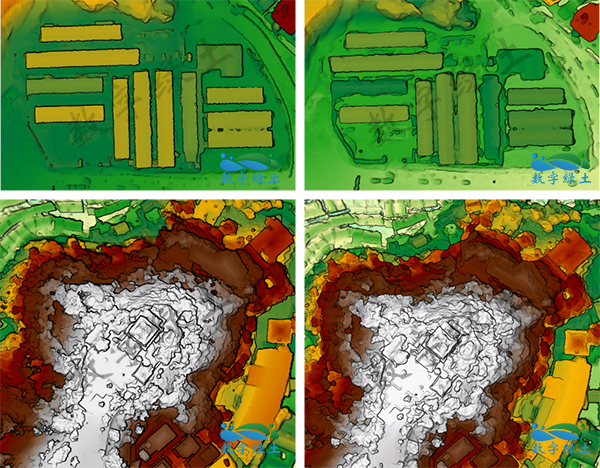
LiMapper与Pix4d局部DSM效果对比(上:区域1 下:区域2)
相比较而言,LiMapper的地物轮廓更清晰,地面平滑程度适中。而Pix4d生成的DSM中树木更加平滑、建筑屋顶比较粗糙,平滑效果更强。
DOM对比
对DOM整体效果及两个局部区域进行对比,效果如下:
DOM整体效果对比(左:LiMapper 右:Pix4d)
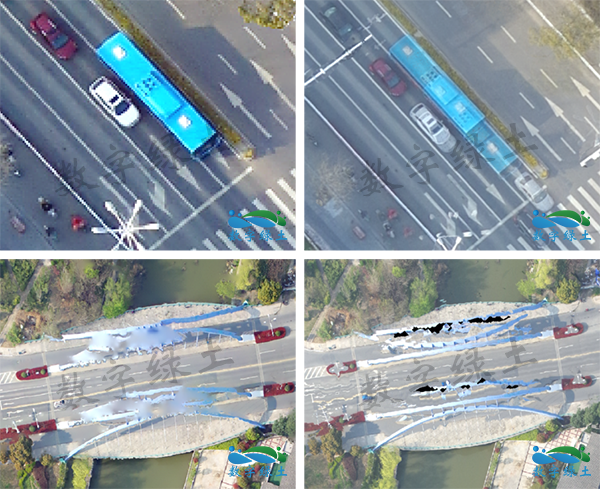
LiMapper与Pix4d局部DOM效果对比(上:区域1 下:区域2)
对于该组数据,两个软件生成的DOM中大部分区域都不错。区域1中,LiMapper得到的车辆较为完整,Pix4d表现为“鬼影”现象。区域2中,两个软件得到的桥梁均有一定程度的截断。