
LiMapper同时支持传统航摄影像及倾斜影像的处理,自动化程度高,处理流程简单,针对海量数据的处理能力尤其出众,其高效并行的体系可以处理 10000张以上的无人机影像,高度自动化的操作流程以及友好的用户操作界面,使用户无需具备专业遥感或测绘技术背景即可快速上手,大大降低了企业在数据处理环节上的人员培训要求。
What’s new in LiMapper 1.1:
- 支持空三结果输出Inpho格式、Smart3d格式;
- 改进密集匹配算法,增强大数据承载能力,提高了点云精度及完整性;
- 支持海量点云显示、浏览、量测;
- 支持点云输出LAS格式;
- 修复了若干Bug。
推荐电脑配置:
- CPU I5以上,支持SSE3
- 内存32GB 以上
- 显卡显存2GB以上,支持GLSL
- 500GB剩余硬盘空间
- Windows 7 SP1 以上
LiMapper主要功能及优势:
- 支持有无POS数据的影像自动并行空三及相机自检校;
- 支持任意数量的相机、多架次、不同航高、多种平台等影像数据的处理;
- 支持快速生成测区可测量的快拼图,满足灾害应急响应快速成图需求;
- 交互式的控制点量测,支持用户自定义坐标系下的正射影像生成,可快速导入到第三方GIS系统;
- 生成专业的精度报告,可及时检查航飞质量及处理异常、定量评估成果质量;
- 生成高精度的三维密集匹配点云及DSM;
- 高效并行的全自动纹理映射,生成精细的三维实景模型;
- 支持近景及倾斜影像数据处理、并可输出高精度可量测的大场景LOD层次模型;
- 稳定性强,操作流畅,用户界面友好,无须专业级的培训;
- 拥有大数据承载力及向导式批处理能力,自动化程度高;
- 采用并行架构+GPU高性能运算,运行效率高;
- 提供多元数据接口,支持输入大多数格式影像数据(如JPG,TIFF,BMP等)和广泛的结果输出格式(如PLY,OBJ,OSGB,IVE等)。
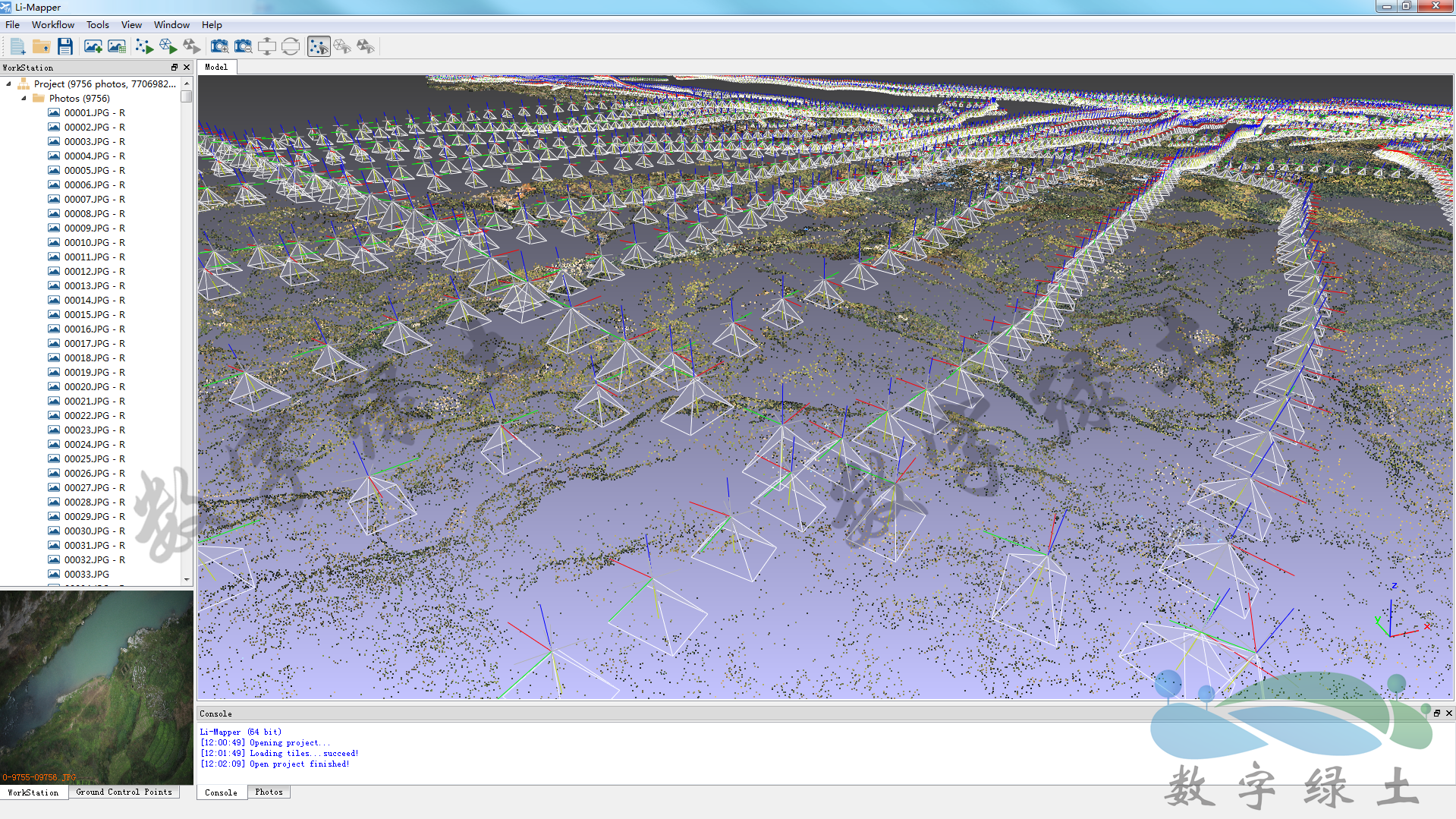
大场景多架次影像并行空三(9756张影像)
详情请查看LiMapper视频