
随着2018年的到来,LiMapper也迎来了2.1版本。作为一款主打速度与精度的航空影像拼图处理软件,LiMapper 2.1在保持对1.4及 2.0版本工程的兼容性的基础上新增了对多光谱数据源、双相机数据源及大尺度数据源的支持。
具体新增功能如下:
- 支持同时打开多个软件实例(建议只一个实例处理数据,其它用于成果查看)
- 支持多光谱数据源、双相机数据源及大框幅数据源
- 新增新建工程向导,支持不同架次的影像和POS的编辑
- 改进匀光匀色算法,减弱拼接后影像的色差且对曝光不足影像有较好自适应性
- 新增工程模板,提供航飞质量检查、三维点云生成模板、正摄影像拼图及多光谱影像拼图模板
- 空中三角测量成果精度提示,可与激光点云配准
- 支持中英文质量报告的切换,且新增航飞质量检查、测区信息及成果信息的展示内容
- 完善控制点的显示和保存,新增影像标记点的预测功能
- 优化软件界面信息展示,如工作区面板新增注册影像数目展示、进度条信息的细化及三维视图信息的优化显示
- 可编辑包围盒来选择局部区域进行处理
- 支持Australis和Photoscan相机标定模型
- 允许用户自定义坐标系
应用案例
- 支持多光谱数据源
LiMapper V2.1支持多光谱数据源多个波段同时处理,且支持多个波段拼图结果合并成多波段影像。如下为镇江的RedEdge多光谱影像,影像数目为11000张,用于测绘领域。
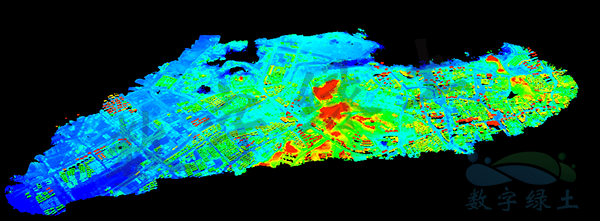
密集点云:依据高程显示



上图为正摄拼图及局部(多光谱影像拼接结果真彩色显示)
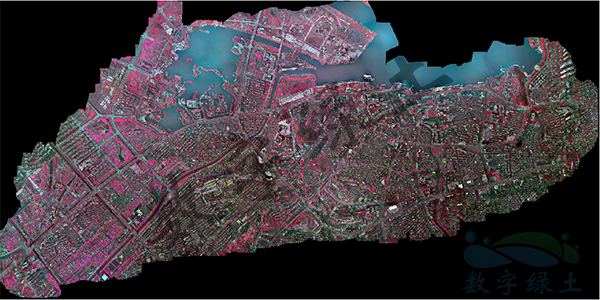


上图为正摄拼图及局部(多光谱影像拼接结果假彩色显示)
教程视频:https://www.lidar360.com/archives/4623.html
- 支持正射影像数据源
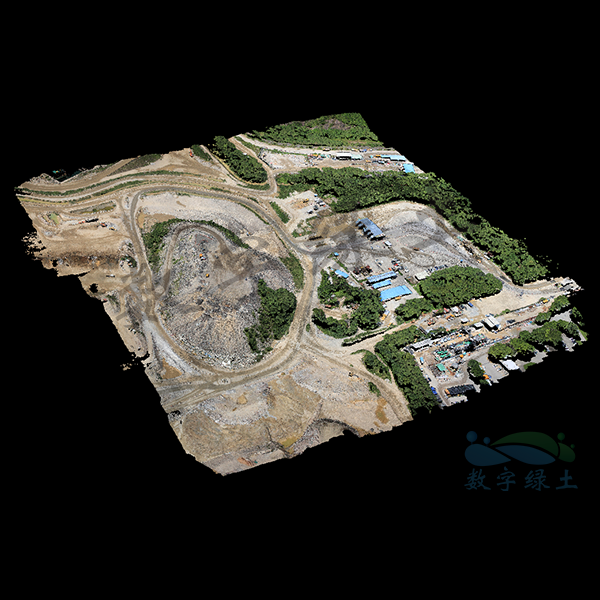
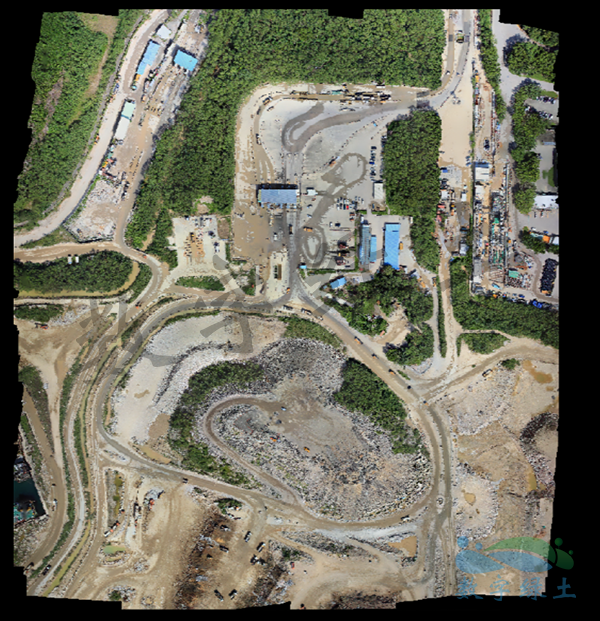
LiMapper V2.1支持不同架次正摄影像及双相机影像处理,广泛应用于地质灾害监测、测绘调查、林业分析及环境应用等领域。
巫山—正射影像—用于灾害监测
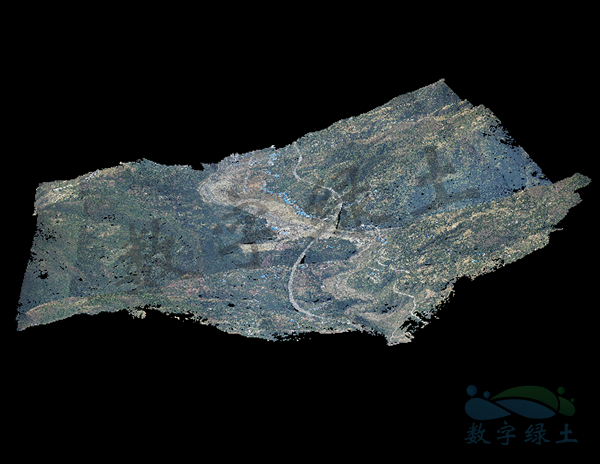

密集点云 正摄拼图
香港—正摄影像—用于测绘领域
密集点云 正摄拼图
LiMapper软件下载链接:https://www.lidar360.com/下载中心
LiMapper2.1功能列表
| 特征 | 优势 | |
| 输入 | 航空影像(正射影像、倾斜影像和多光谱影像)和地面影像 | 可以处理来自空中载人或无人平台及地面拍摄的数据 |
| 多类型相机支持(compact、SLR、rededge、sequoia、tetracam,large-frame等) | 支持多种类型的相机数据,从小框幅到大框幅,从消费级到专业级相机数据 | |
| 同一工程多相机支持 | 同一工程中包含多个相机数据,并一块处理 | |
| 相机组支持 | 处理多个同步相机采集的数据 | |
| 地面控制点的编辑、导入和导出(*.txt,*.gcp,*.xml) | 导入和编辑地面控制点提高工程的精度 | |
| 局部及任意坐标系统的支持
(角度和米制单位) |
选择已有的坐标系或者自定义地理和投影坐标系 | |
| 支持相机外方位(*.txt,*.csv) | 依据初始的GPS和IMU参数优化相机外参 | |
| 外部dsm/dem导入 | 支持外部导入dsm/dem用来生成dom、Tdom | |
| 处理 | 快速生成质量报告 | 对拍摄区域参数进行统计及采集数据的质量和精度进行评估 |
| 目标特征检测和匹配 | 支持对特征提取参数及匹配参数的自定义处理 | |
| 相机自检校(*.out,*.prj,*.xml,*.txt) | 优化相机的内外参数并支持与bunder\inpho\smart3d等软件进行对接 | |
| 自动空中三角测量及光束法平差 | 支持对有或无相机外参数据的自动处理 | |
| 点云分类 | 基于稀疏/密集点云分类地面点产生dem | |
| 自动的点云滤波和平滑 | 对点云进行滤波和平滑去除噪点 | |
| 自动DSM/DEM提取 | 基于稀疏或密集点云提取DEM/DSM | |
| 颜色和亮度校正 | 正射拼图过程中支持选择是否进行颜色和亮度校正 | |
| 工程区域的编辑 | 支持包围盒的调整确定作业区域 | |
| 多核和GPU处理 | 基于cpu和GPU加快处理速度 | |
| 匀光匀色 | 支持匀光匀色等级调整 | |
| 拼接图编辑 | 区域编辑 | 选择待修改区域,从可视影像列表选择最佳影像进行替换 |
| 局部融合 | 编辑局部区域,对修改区域进行融合 | |
| 工程功能 | 新建工程 | 添加新建工程向导,将影像添加删除、pos导入清除及相机模型设置添加到向导 |
| 新建工程支持模版选项 | 利用不同的应用需求创建不同模块,并可以模版的编辑及复用 | |
| 打开工程 | 支持手动及拖拽添加工程 | |
| 打开最近工程 | 记录最近的工程,便于快速打开 | |
| 关闭工程 | 对当前工程进行关闭 | |
| 保存工程 | 对当前工程进行保存 | |
| 视图功能 | 工程可视化 | 对优化的相机姿态、三维点云进行展示 |
| 手动连接点的编辑 | 基于已注册的影像在未注册上的影像上添加连接点 | |
| 相机视锥体和缩略图的缩放 | 对相机的姿态和不同高程的覆盖范围进行展示 | |
| 工程的再优化 | 基于gps/IMu数据、控制点或手动连接点提高处理精度 | |
| DEM/DSM颜色条的修改 | 修改颜色条改变DEM/DSM的渲染 | |
| 3D视图EDL渲染 | 改善显示效果 | |
| 成果输出 | 2D成果 | 正射/真正射拼图(*.tif)
正射/真正射拼图的谷歌地球图层(*.kml) 无畸变影像 |
| 2.5D成果 | DEM/DSM(*.tif) | |
| 矢量数据 | 拼接线(*.shp) | |
| 3D成果输出 | *.Ply,*.obj,*.las(稀疏点云和密集点云)
*.osgb 密集点云 |
|
| 相机检校模型(内参和外参) | *.out对接bundler
*.prj对接inpho *.xml对接smart3d block-AT *.txt只导出外参 |
|
| 相机内参模型 | *.xml兼容photoscan
*.txt 对接Australis格式 |
|
| 设置 | 系统设置 | 点大小设置、CPU核数、GPU及语言切换 |