
- TIN滤波:适应性强、效果稳定,大部分情况下,合理的参数设置能够得到较好的结果,但是TIN滤波涉及的参数较多。
- 坡度滤波:基于坡度变化提取地形,对坡度变化较为敏感,不适合坡度陡峭的地区,容易削平地形凸起,更适合地形变化平缓的区域。
- 二次曲面滤波:利用指定大小的窗口内的点云拟合二次曲面,根据曲面高差阈值分离地面点,分类效果和效率受窗口大小影响。适合有一定的地形起伏,但不甚陡峭的区域。
2、矢量编辑
新增房屋、道路、水域、林地矢量化功能,可生成SHP和DXF格式的矢量化成果,支持与ArcGIS、AutoCAD等第三方软件无缝对接。
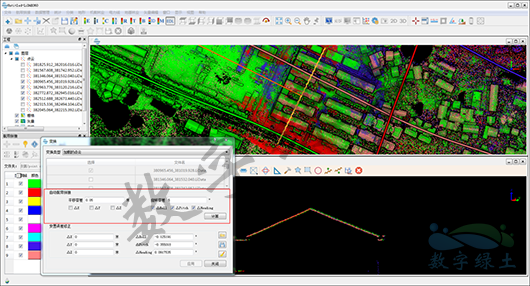
3、断面分析
沿着交互绘制或外部导入的断面线提取点云,或生成横纵断面图,反应道路、河流等沿线地形起伏变化。在断面图中,可进行轨迹追踪。
4、剖面两端延伸
在剖面中查看航带拼接结果或者编辑点云类别时,可使用剖面延伸工具。
5、按点数分块
适用于机载点云数据,分块的时候兼顾空间和点密度。
6、生成带投影信息的tif影像
7、更丰富的地形产品格式,栅格数据新增ASC格式,等高线新增DXF格式
同时,2.1版本融入了一系列新算法:
1、基于机器学习的通用监督分类
为了解决LiDAR360无植被分类,以及已发布版本中条件式的建筑物分类仅限于部分屋顶的问题,2.1版本新增基于机器学习的通用监督分类。核心思想是:在同一批次数据中,手工编辑少量数据的类别,训练模型后批量处理大量数据,减少人工量,完成自动分类后,可以人工检查质量,并利用LiDAR360交互式界面编辑分类结果。
机器学习支持两种方式:一是选择训练样本,生成训练模型,处理待分类数据;二是利用已有的模型处理待分类数据。
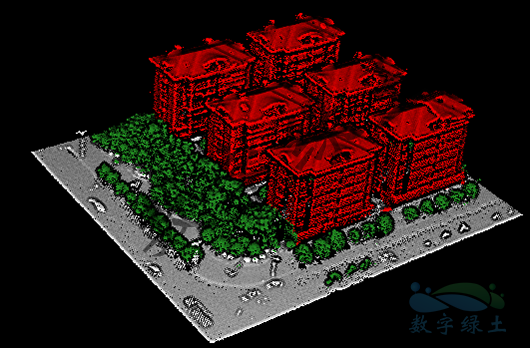
训练少量人工编辑数据,包含未分类、植被、建筑,且都参与训练
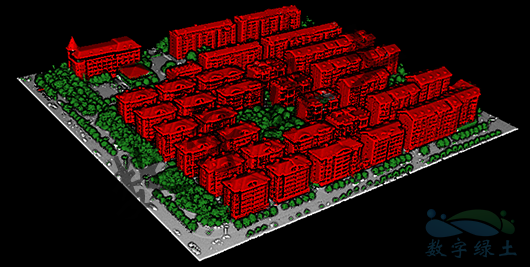
处理大量数据结果,包含未分类、植被、建筑
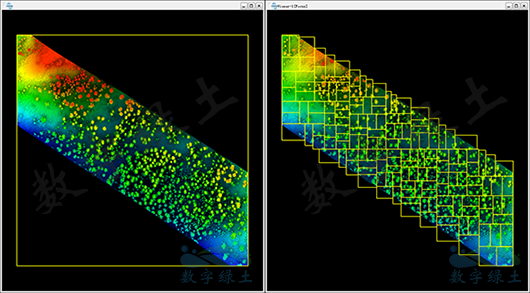
2、自动计算航带匹配参数
自动提取相邻航带间的匹配点和相关面,进行平差计算,估算安置误差,降低操作人员的工作量,减少人工量测产生的误差,得到较为均衡的修正结果。
3、UAV点云地面点分类
一般情况下,小飞机、无人机(UAV)所扫描的点云数据密度较大、地面点较厚,如果采用传统大飞机提取地面点的方法提取地面点,则所提取的地面点较厚且凹凸不平。
采用此方法,可以获取较厚地面点中间一层较薄且更平滑的地面点。
选择区域分离地面点、矢量编辑、断面分析、机器学习分类等功能的使用请参考公司网站的教程视频。
新功能视频演示:https://www.lidar360.com/archives/category/点云处理软件lidar360