
激光雷达点云解算软件是什么
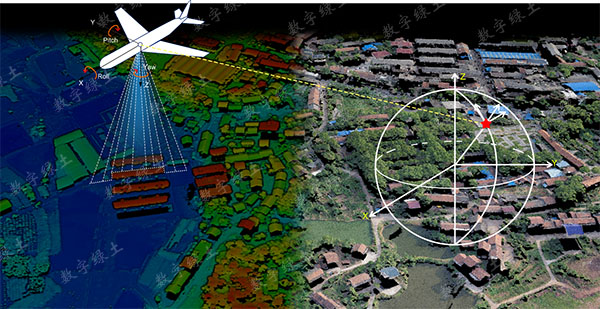
机载/车载/无人机等平台搭载激光雷达扫描仪获取的原始数据为激光扫描参考坐标系(scanner’s own coordinate system, SOCS)下的点云数据,需利用相关的激光雷达点云解算软件,结合组合导航设备(GNSS/INS)提供的POS(位置和姿态)数据,解算出WGS84或用户自定义坐标系下的具有真实地理坐标的激光点云数据后,再用于生产研究。
LiGeoreference激光雷达点云解算软件
LiGeoreference是数字绿土自主研发的一款激光雷达点云解算软件,既可作为独立的解算软件支持多种激光雷达扫描仪的数据解算,也可结合影像数据解算彩色点云,同时可快速集成到第三方软件,支撑用户自定义的硬件平台数据获取及解算。
软件特征:
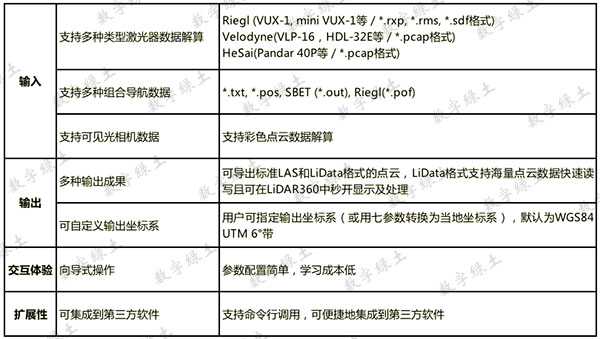
- 数据源丰富
支持多类型激光器的数据、多种组合导航数据及可见光影像数据。
- 解算速度快
解算20G 的Riegl VUX-1激光雷达扫描仪获取的数据,生成LAS格式的点云,只需6分14秒。(详细结果可参考LiGeoreference解算效率表)
- 向导式操作
支持参数记忆和导出导入,参数配置简单。
- 可集成到第三方软件
支持命令行调用,方便集成到第三方软件。
附 LiGeoreference解算效率表
电脑配置参数:
- CPU:Intel I7-6700K
- 内存:32G
- 显卡:NVIDIA GeForce GTX1060

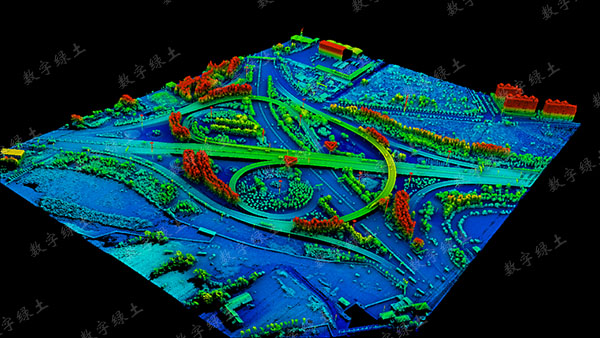
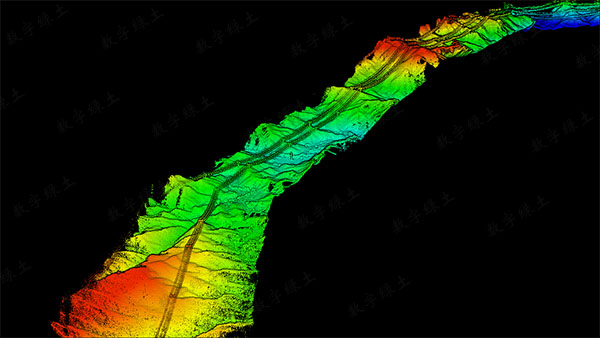
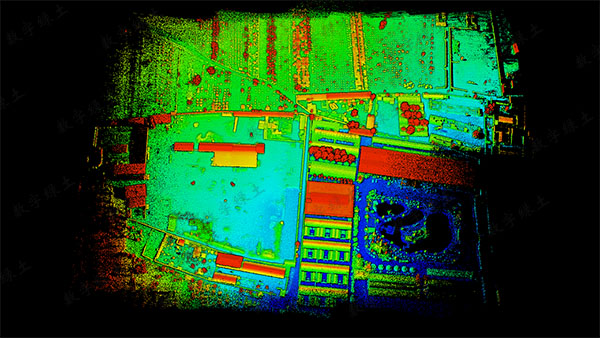
- 点云解算结果
- 真彩色点云解算结果

