
LiPlan是数字绿土自主研发的一款针对无人机激光雷达系统的地面站APP,可实现无人机一键起飞按规划路径自动采集点云/影像数据, 实时显示激光雷达状态参数及无人机状态参数,作业结束后无人机自动返航或悬停由飞控手控制返航。
设备状态实时显示
- LiDAR状态参数显示
GPS周、RTK状态、实时位置及姿态角度、经度标准差、纬度标准差、高度标准差、航偏角标准差、俯仰角标准差、航偏角标准差、主天线卫星数、从天线卫星数、激光点云文件大小及SD卡剩余空间等。
- UAV状态
实时航飞高度、水平速度、垂直方向速度、姿态展示等。
航飞任务规划
- 手动规划模式
该模式下,用户可在界面自定义航点,对航高、航点动作等参数进行设置和交互编辑航点。

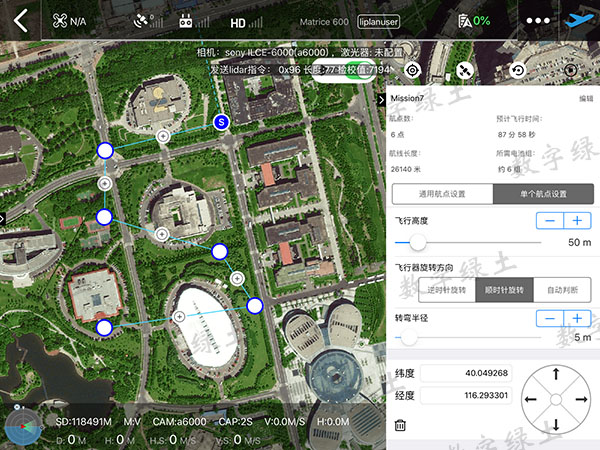
手动规划模式基本信息显示和作业参数设置

UAV LiDAR状态参数显示
- 区域规划模式
该模式下,用户可在界面绘制作业区域并交互编辑修改,依据测区及设置的航飞参数(例如航向重叠率、旁向间隔、航高和激光器类型等参数)自动规划航线。

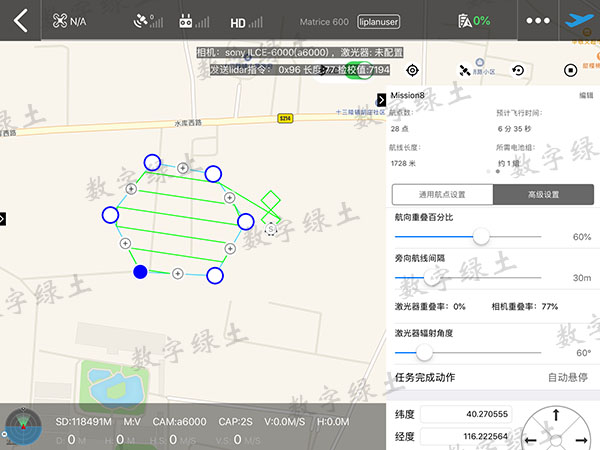
区域规划模式基本信息显示和作业参数设置

UAV LiDAR状态参数显示
- 导入模式
该模式下, 云端下载KML文件构建作业区域范围,区域支持用户交互编辑修改,设置航飞参数(详见区域规划模式)自动规划航线。
支持云端进行账户及工程管理
- 账户管理
LiPlan基于账户进行工程管理,支持账户注册、登录及密码修改等功能。
- 工程管理
LiPlan支持联网上传创建任务、同步云端工程、云端下载航飞轨迹。
| 特征及优势 | ||
| 支持设备 | LiAir | · 支持LiAir AX50/LiAir AX100/LiAir AX200/LiAir AS100/LiAir AS200/LiAir AS250 |
| 激光器 | · 支持多厂商及多型号激光器
· 支持Velodyne 16线和32线设备,Riegl Vuxmini和Vux,禾赛等 |
|
| 相机 | · 支持Sony ILCE进行影像采集
· 大疆禅思系列相机拍摄环境实时回传 |
|
| 无人机 | · 支持DJI消费级无人机飞行控制,例如御、晓及精灵系列等
· 支持飞行平台DJI MATRICE 600和MATRICE 600 PRO |
|
| 飞控平台 | · 支持DJI的A3和N3飞控 | |
| 任务类型 | 手动规划 | · 航点编辑
· 飞行参数设置 · 作业进度显示,视图中以不同颜色区分航线是否执行 · LiAir状态参数实时显示 |
| 自动规划 | · 区域范围编辑
· 测区航线规划及自动绕8字规划 · 区域模式作业参数设置 · 作业进度显示,视图中以不同颜色区分航线是否执行 · LiAir状态参数实时显示 |
|
| 导入测区范围 | · 联网从云端下载KML格式的测区任务
· 界面参考自动规划模式 |
|
| 导入航点模式 | · 联网从云端下载TXT格式的任务文件
· 界面信息参考手动规划模式 |
|
| 参数设置 | 通用设置 | · 激光器和相机型号设置
· 指南针校准 · 控制模式 · 飞行器失控动作等 |
| 任务参数设置 | · 飞行速度、飞行高度、转弯模式、任务结束动作等通用航点设置
· 单个航点的飞行高度、转弯半径的设置 · 区域模式设置航向重叠率和旁向间隔等信息 |
|
| 可视化 | 激光器状态参数 | · 显示GPS周、激光器同步状态、经纬高信息、姿态角度、主天线卫星数及从天线卫星数等信息 |
| 无人机飞行状态 | · 实时飞行高度、水平速度和垂直速度等
· 工具条状态信息:GPS信号、遥控器信号、无人机电量等信息 |
|
| 规划任务参数 | · 任务参数显示:航点、航线数及区域面积等信息
· 手动规划:通用航点参数(速度、高度及转弯模式等)和单个航点设置(飞行高度、转弯半径等) · 自动规划:通用航点设置(速度、高度和转弯半径等)和高级设置(航向重叠率、旁向间隔等) |
|
| 地图视图界面 | · 地图参数:地图类型切换、定位、旋转锁定等 | |
| 相机视频回传 | · 相机曝光参数设置及显示
· 相机画面的实时回传 |
|
| 云端管理 | 账户管理 | · 支持账户的注册、登录、修改密码及退出 |
| 工程管理 | · 规划任务工程的上传及同步更新
· 航飞规划文件的下载 |
|