
一、概述
精确量测矿石堆体积是矿山测量的常见工作。传统采用的方法是采用全站仪或GPS RTK测量堆积物表面的离散点坐标,再计算矿石堆的体积。由于这些堆积物表面形状比较复杂,测量的离散点有限,部分高程无法观测,实践过程中只能通过等高线模拟得到矿堆体积;采用摄影测量求取矿堆体积时,难以确定一些堆积物的同名点对,精度较差,测量结果误差较大。
本文介绍采用基于背包平台的三维激光扫描系统对堆积物进行观测,快速获取大量矿石堆表面点的三维坐标的同时,测量点也较为均匀地分布在堆积物表面,可以精确地计算出矿堆的体积。

二、设备选用
- 背包激光雷达扫描系统—LiBackpack 50
LiBackpack 50是北京数字绿土科技有限公司自主研发的室内外一体化激光雷达扫描系统,结合激光雷达和SLAM技术,无需GPS即可实时获取高精度点云数据。可用于地下空间信息获取、隧道工程、数字工程、数字矿山、林业资源普查、建筑立面测量等领域。

| 系统参数 | |||
| 尺寸(mm) | 975 X 335.6X 102.9 | 电池 | 5700mAh |
| 重量 | 5.8kg | 工作时间 | ~2.5h(一块电池) |
| 功率 | 60W | 端口 | HDMI,USB,网口 |
| 电压 | 22.8V | 存储 | 512G SSD |
| 电流 | 1.9A | 适用环境 | 室内和室外 |
| 控制及显示 | 网络控制和显示(手机、平板电脑);有线数据传输(平板电脑) | ||
| 传感器参数 | |||
| LiDAR 传感器 | VLP16 | ||
| LiDAR精度 | ±3cm | ||
| 垂直视场角 | -15°~15° | ||
| 测量范围 | 100m | ||
| 数据成果 | |||
| 数据精度 | ~ 5cm | ||
| 点云格式 | las,ply | ||
产品优势
- 厘米级数据精度
结合激光雷达和SLAM算法实现室内外一体化测量,无需GNSS信号即可实现厘米级数据精度
- 高效率
采集的目标物点云数据在手机/平板等移动端实时同步显示,支持在线闭环及闭环优化,扫描完成即可导出点云数据和运动轨迹。
- 低成本
无需GPS,成本大幅度降低。
- 操作简单
软硬件融合,高度自动化,开机即用。
- 多平台
设计轻巧便捷,可搭载不同的移动平台,手持、步行、骑行、车载都可以轻松采集数据。

- 点云处理分析软件—LiDAR360
LiDAR360是数字绿土自主研发的一款专业激光雷达点云数据处理和分析软件,基于自主知识产权的点云数据处理平台,扩展地形、林业、电力等行业模块。主要功能包括海量点云数据可视化编辑、基于严密几何模型的航带匹配、点云自动 / 手动分类、地形产品生成、林业分析、电力巡检。
三、矿堆测量技术流程
利用LiBackpack 50进行矿堆体积量测分为四个步骤:现场路径规划、数据采集、点云数据处理、矿堆体积量测。
![]()
(LiBackpack+ LiDAR360矿堆测量技术流程)
1、现场路径规划
根据矿堆的大小、高度、周围环境等因素,确定合适的扫描路线。路线要求:
路径设计不要弯弯曲曲,尽可能保持平稳过渡。

(2)若矿区较大,最好走S型路线进行数据采集。
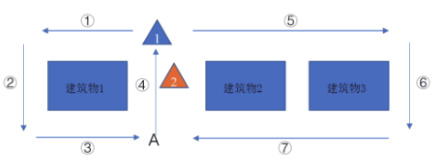
(3)扫描路线不要来回多次重复,尽量一次扫完一个区域。
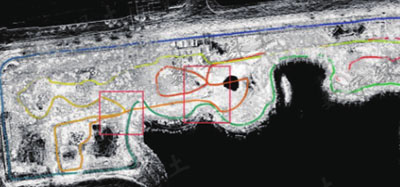
2、现场数据采集
按照预先规划好的路线进行数据采集,连接移动端设备后,点击界面start按钮开始采集数据, 设备扫描时用户可在手机/平板电脑上查看实时扫描的点云以及运动轨迹,采集完成后=点击stop按钮停止采集。若作业区域面积较大,用户可借助自行车、平衡车、电动车等工具进行现场数据采集工作,可提高扫描效率。


(作业人员进行数据采集,在手机上查看实时的采集情况)
现场采集注意事项:
(1)从静止的位置开始,待屏幕出现点云数据后开始移动采集;
(2)避免后期噪声点过多造成的处理时间长,扫描场景里尽量减少人或物体移动。
3、点云数据处理
通常采样空间表面粗糙度大、干湿不均,导致在三维激光扫描过程中不可避免地会获得大量的噪声点云。该类噪声点(包括漂移点、孤立点、冗余点、混杂点等)的存在不仅增加了数据量,而且严重影响了点云质量和后续矿堆体积量测,会降低数据处理效率,因而有必要进行点云去噪,删除噪声点数据。
4、矿堆体积量测
使用LiDAR360软件的体积量测工具直接进行矿堆体积量测,交互式选择测量参考平面,计算相对于参考平面的填方、挖方和填挖方量,从而计算得出矿堆的体积信息。
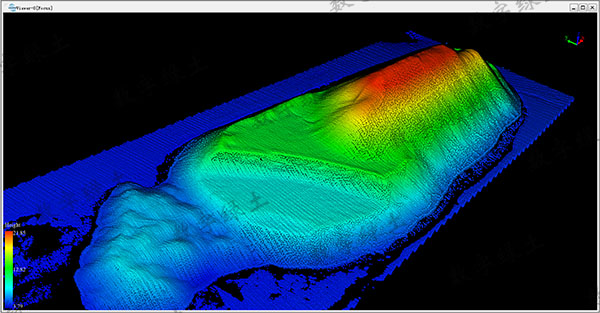
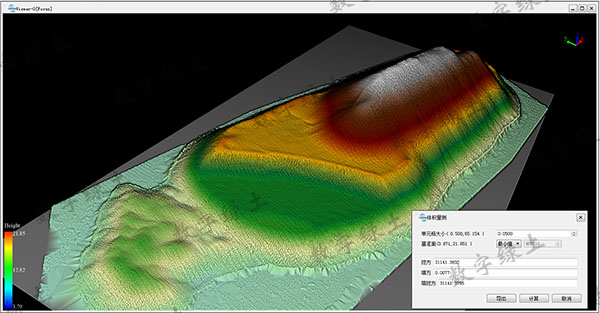
在计算过程中,单元格大小设置的过大,则格网不能很好地反映地形变化,如果格网设置的过小,则容易受到表面噪声点的影响。根据长期经验,建议将格网大小设置为0.03~0.05。