LiBackpack背包式室内外一体化激光雷达扫描系统,结合激光雷达和同步定位与制图构建(SLAM)技术,无需GNSS即可实时获取周围环境的高精度三维点云数据。

设备参数
- 数据精度:~5 cm
- 测量范围:100m
- 适用环境:室内和室外
- 工作时间:~2.5h(一块电池)
| 系统参数 | |||
| 尺寸(mm) | 975 X 335.6X 102.9 | 电池 | 5700mAh |
| 重量 | 6.3kg/5.8kg | 工作时间 | ~2.5h(一块电池) |
| 功率 | 76W / 60W | 端口 | HDMI,USB,网口 |
| 电压 | 22.8V | 存储 | 512G SSD |
| 电流 | 1.9A | 适用环境 | 室内和室外 |
| 控制及显示 | 网络控制和显示(手机、平板电脑);有线数据传输(平板电脑) | ||
同时,支持手持作业模式:
应用场景
LiBackpack 尤其适用在有丰富三维结构的环境中,如室内建筑物、室外 林区、居民地等。
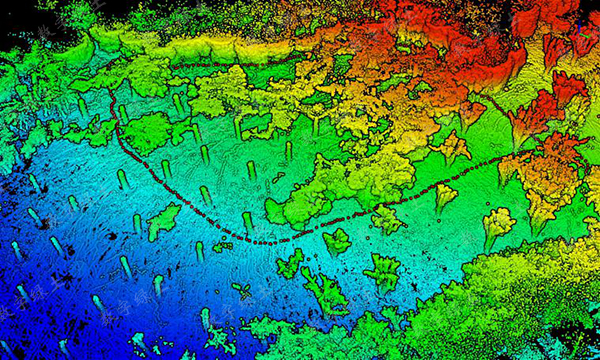
林区扫描
用LiBackpack沿规划路线快速获取林区的三维激光点云数据,可以统计树木的胸径、材积、郁闭度等信息。
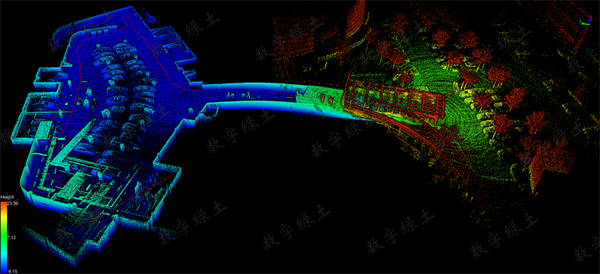
室外扫描
用LiBackpack沿规划路线,获取指定区域的三维激光点云,可以生产DLG、建筑物立面图、计算建筑面积等。
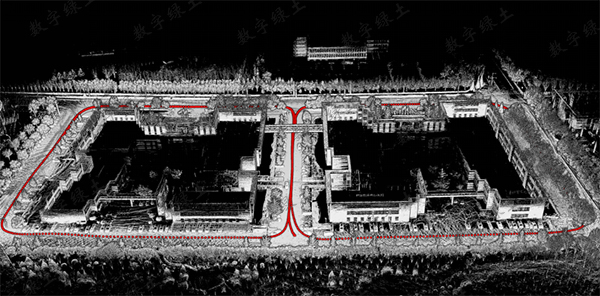
地下车库扫描
用LiBackpack沿规划路线,快速获取地下车库的高精度三维激光点云数据,可以生产DLG 、地下车库三维模型、统计车位数量等。
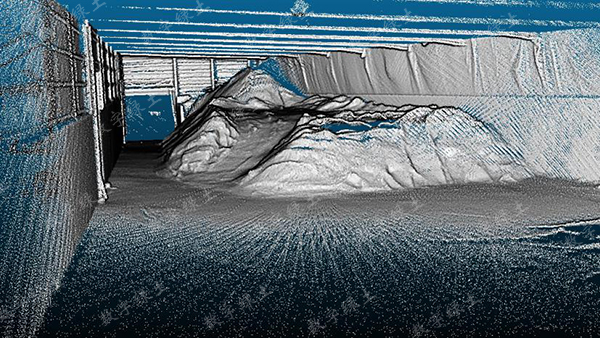
工地扫描
用LiBackpack沿规划路线,获取工地的激光三维点云,可以测量工地堆积物土方量,如煤堆、矿石堆等,也可以测量工地挖方等数据。
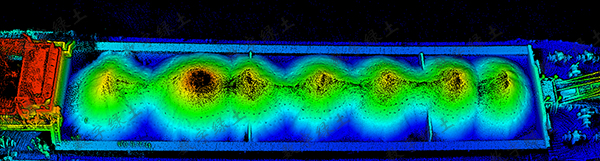
运沙船
用LiBackpack沿着船体外沿快速获取运沙船的高精度三维激光点云数据。通过对每艘船只扫描一次空船建立空船数据库,船体满载时,同样的方法对满沙船进行扫描,结合两次扫描数据,即可计算出船载泥沙土方量。