
点云数据 | Point Cloud Data
在同一空间参考系下表达目标空间分布和目标表面光谱特性的海量点集合,是由物体模型表面上一系列空间采样点构成的模型几何描述,也是三维激光扫描数据的通用表现形式。
- Pi = { Xi,Yi,Zi,……. }表示空间中的一个点;
- Point Cloud = { P1,P2, P3,…..Pn }表示一组点云数据。


点云数据格式 | Data Format
点云数据中包含了每个点的经纬度坐标、强度、多次回波、颜色等丰富的信息(关于点云的信息特征后期会具体讲解),在测绘、林业、农业、数字城市等领域均有相关应用。而目前常用的激光雷达扫描仪设备,如Riegl、Faro、Leica等,每秒均能产生成千上万个点,每次扫描获取的数据点数能达到数十万、数百万,数据量达几十至几百G,如此庞大的数据量给数据的存储和处理带来了挑战,点云数据的高效组织与管理是成为了数据处理的门槛。
- 各传感器厂家定义的数据格式:
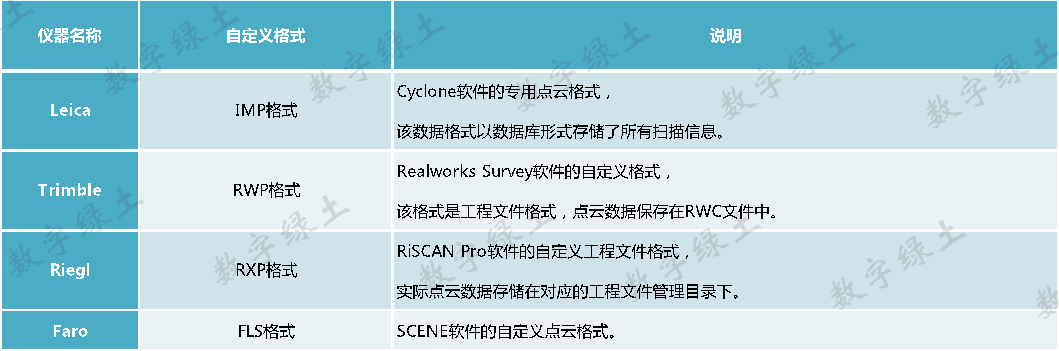
- 常见LiDAR点云数据格式类型:
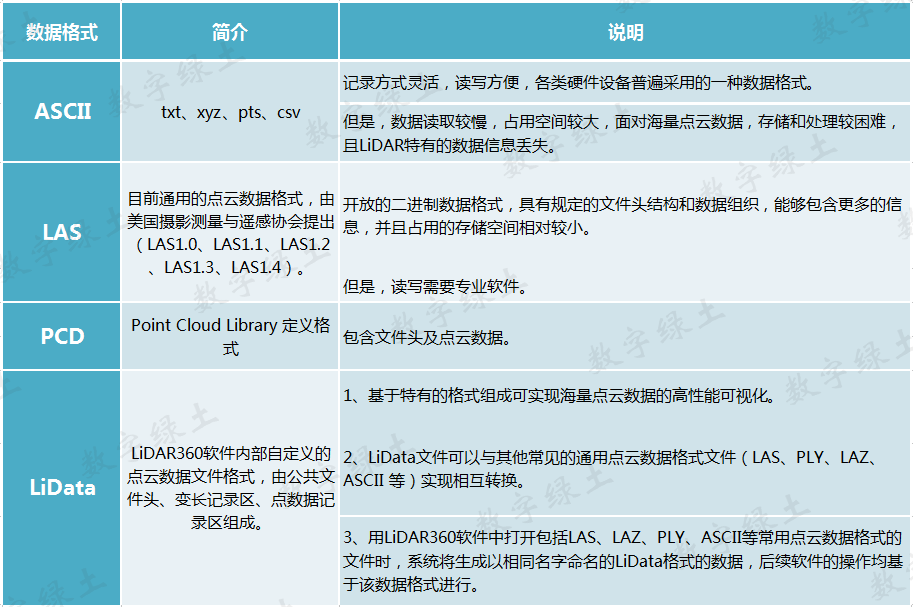
ASCII数据格式
LAS数据格式

PCD数据格式
LiData数据格式
*.LiData为LiDAR360软件自定义点云数据格式,为非通用格式,软件加载LAS/ASCII/PLY等格式的点云数据时,系统会自动对数据进行格式转换,自动生成对应的LiData格式进行后续处理。
LiData点云格式性能测试(将LiData与las格式进行对比):
- 测试硬件环境
系统:Windows 7 旗舰版 x64
图 测试环境(数据加载时间主要跟电脑内存和系统设置有关)
- 测试数据
共选取无人机、直升机、地基、背包三种平台,不同扫描仪采集的点云数据。
- 测试结果:
RIEGL VUX-1UAV采集数据 数据量对比
![]()
RIEGL VZ2000 采集数据 数据量对比
![]()
Velodyne VLP16采集数据 数据量对比

Faro X330 采集数据 数据量对比
![]()
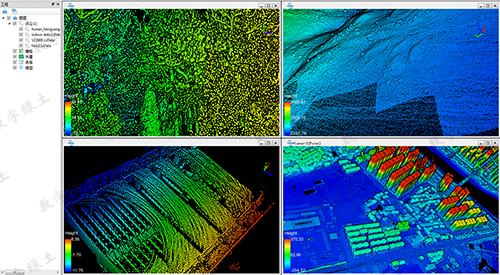
点云数据显示如下:
通过对比发现,LiData与通用点云格式(LAS)相比,基于该格式下可明显减少数据的存储量,进行格式转换后,普通PC也可实现瞬间加载海量点云数据,帮助使用者后期更好地管理海量点云数据。
想要体验海量加载数据的乐趣,
请猛戳 这个链接:https://www.lidar360.com/下载中心
我们提供LiDAR360软件的免费试用哦~
PS: LiDAR360支持的数据类型包括点云、栅格、矢量、表格和模型五大类。
LiDAR360 软件支持的点云数据格式:
- LiData (*.LiData自定义点云格式)、
- LAS (*.las,*.laz)、
- ASCII (*.txt, *.asc, *.neu, *.xyz, *.pts, *.csv)
- PLY (*.ply)