
一、项目概况
此次项目主要是对某220kV输电线路共28基杆塔进行自主精细化巡检技术应用试点。
- 测区电力线总28基杆塔,包含耐张塔8基,直线塔20基。
- 为保障试点项目的成功,数字绿土技术团队在2019年7月份便启动了自主精细化巡检技术研究,通过调研国内电网自主精细化巡检的现状,根据电网运维现状,在实施单位院内培训线路进行技术验证测试,经过不断总结调试,制定了自主精细化巡检试点项目实施方案和措施。
- 使用LiAir220无人机激光雷达设备采集线路激光点云数据
- 使用LiPowerline自主精细化巡检模块进行小型旋翼无人机自主精细化巡检航线规划
二、技术背景
输电线路杆塔精细化巡检,一直是电网运维工作的重中之重,传统精细化巡检工作,一直是采用人员现场巡视的方式。由于多旋翼无人机能接近巡检目标进行拍摄,作业效率高,人员劳动强度相对较低的特点,因此近年来,多旋翼无人机在精细化巡检工作中的应用越来越广泛。
然而,新的巡检作业方式,同样会产生新的问题。操控多旋翼无人机进行输电线路精细化巡检,对运维班组人员提出了很高的要求,由于人员水平的参差不齐,作业效率和影像的拍摄效果都难以保证。与人工操控无人机进行精细化巡检的方式相比,无人机自动巡检技术可实现航线自动生成、无人机自动飞行、自动定点精准拍摄,提高了架空线路精细化巡检作业效率和智能化水平,降低人员参与度,能极大程度的解决结构性缺员、人员素质水平参差不齐、巡检影像效果不佳等问题。
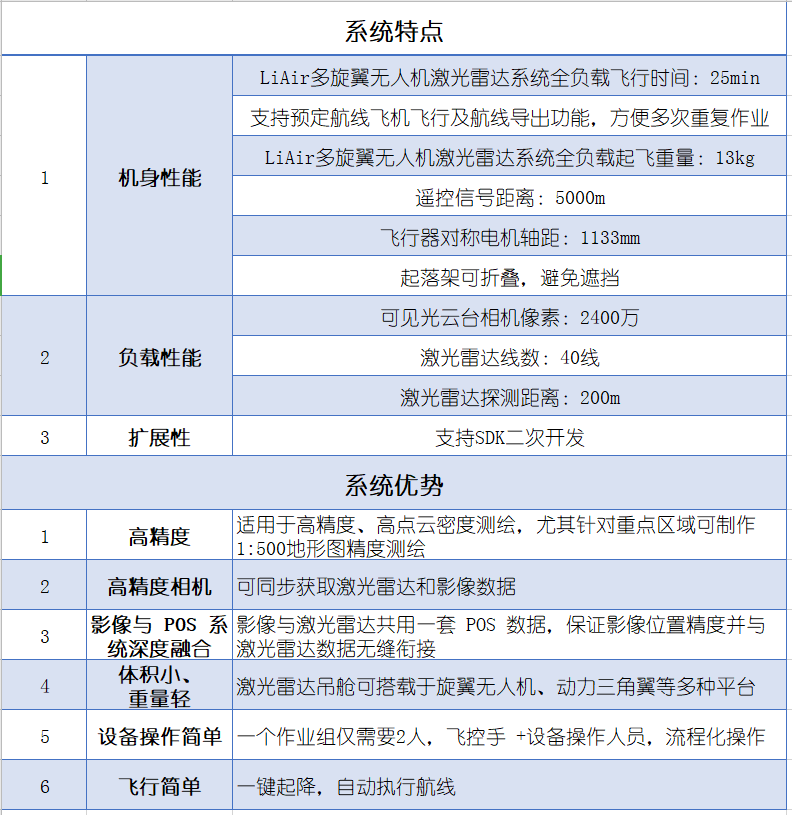
三、设备介绍

四、项目难点
目前,智能巡检技术仍处于探索和试验阶段,因此在本次试点项目实施过程中,也遇到了一些困难。例如,在航线执行过程中,大疆精灵4RTK避障模块一旦触发,航线任务将直接终止,因此航线规划和航线检查工作须极为细致。对于基于复飞的智能巡检方法,其在航线规划的过程中,经常会遇到由于电磁干扰导致的无人机RTK信号断开的情况,影响航线采集工作的正常进行。
五、项目流程
1、激光雷达数据采集及解算
采用LiAir 220多旋翼激光雷达设备,采集28基杆塔的激光点云数据,数据解算与采集同步完成,28基杆塔在1天内即完成了全部点云采集及解算工作。
2、基于LiPowerline的无人机自主巡检航线规划
采用LiPowerline激光雷达点云数据处理软件所包含的无人机自主精细化巡检航线规划功能,进行了全部28基塔的航线规划,耗时1天。
3、自主巡检航线执行
采用LiPowerline激光雷达点云数据处理软件所包含的无人机自主精细化巡检航线规划功能,进行了全部28基塔的航线规划,耗时1天。
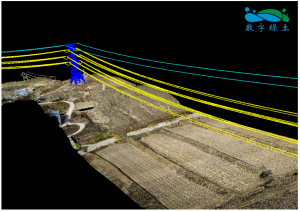
六、数据成果
1、电力线点云展示
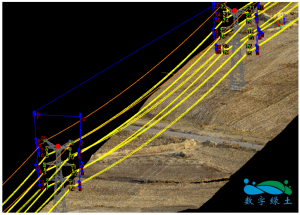
2、自主精细化巡检航线展示
3、自主精细化巡检拍摄成果展示

七、总结和展望
基于激光雷达的自动巡检方法,适用于大部分常见塔型,且适用于地形崎岖,人员难以靠近杆塔的环境,而对于换位塔、分歧塔、终端塔等特殊塔型及复杂线路形式,基于复飞的方案则更为适用,同时,基于复飞的方案更有利于实时发现和解决拍摄遮挡问题。因此,未来自动巡检技术的应用,应该是基于点云的方案和基于复飞的方案相辅相成,优势互补的格局,以基于点云的自动巡检技术为主,覆盖大面积常见线路及复杂地形,提高巡检效率,以基于复飞的自动巡检技术为辅,针对较为少见的小区域特殊线路,弥补基于点云的方法航线规划困难的问题。
输电线路精细化巡检的另一大难题是巡检影像判读/缺陷识别,在这个领域,国内目前都还停留在人工判读和标注缺陷,人工进行影像重命名的阶段,作业效率低,劳动强度大。国内大量的电网科研单位、高校、企业开展了输电线路缺陷智能识别技术的研究,而收获的成果,大多数还停留在识别巡检目标,识别绝缘子自爆、鸟巢等简单隐患的阶段,且识别率并不理想。未来,输电线路自动巡检技术,将为输电线路缺陷智能识别提供强有力的支持,由于影像获取的效率大幅提升,同一拍摄目标点的多期巡检影像,其拍摄角度和位置基本相同,缺陷智能识别的难度将大大降低,且拍摄流程的规范化和统一化,会使影像自动重命名变得容易实现。
随着科技的发展,各行各业都步入了自动化的进程,许多行业都会向着人工智能取代人工的方向发展,输电线路精细化巡检也不例外。目前的输电线路自动巡检技术仍然存在很多技术难关需要攻克,在不久的将来,如果这些难关被一一突破,电网运维工作将迎来全面高效化、自动化、智能化的时代。