
三维扫描服务
1.简介
传统的三维建模方法主要由单点测量(全站仪、GPS等)或航空摄影测量的方法来实现的。但是这两种方式建立几何模型的工作量很大,精度也不高,不能快速获取三维空间数据、精确建立模型,而且后者也不适合小区域的数据采集。三维激光扫描技术通过非接触式测量快速获取物体表面大量的三维点云坐标和纹理颜色信息,是一种快速、精确、高效的三维空间信息获取方式。根据三维点云可以迅速还原三维场景、构建三维模型。
2.我们所提供的服务
为客户提供地基的、车载的、低空的,不同尺度的、不同密度的任何实物的激光扫描数据的搜集、处理与建模工作。
激光雷达可实时、主动、快速地获取城市建筑,森林,农田等大型近景目标的三维信息,可以对所获取的数据进行自动处理与模型重建,可广泛应用于城市、大型文物等测绘领域。用于城市三维空间数据和表面图像数据获取、处理与重建的近景三维测量系统。
车载激光雷达还可以对土地、地物的数字正射影像(DOM)、数字表面模型(DSM)、数字高程模型(DEM)、数字线化图(DLG)和数字三维模型进行数据采集。
3.我们的解决方案
采集三维点云数据所用的平台是我们公司自主研发的LiMobile车载激光雷达系统和 LiAir无人机激光雷达扫描系统,所用的点云数据处理软件是LiDAR360。
机载激光雷达系LiMobile统集成了激光雷达(LiDAR)、全球定位系统(GPS)、惯性测量单元(IMU)和航空数码摄影测量等先进技术,是目前航空遥感摄影测量领域的最新技术手段,能够快速获取高精度、高空间分辨率的数字地表模型,进而获取地表物体的垂直结构形态,具有快速高效与精确定位等优点。
LiDAR360是北京数字绿土科技有限公司自主研发的激光雷达点云处理软件,提供点云数据后处理的一站式解决方案。软件所采用的算法多次获得国际摄影测量与遥感协会的大奖,并且被美国国家森林局采用。
4.我们的优势
(1)数据获取速度快,实时性强;
(2)获取的数据量大,精度较高;
(3)采用主动式测量,可以全天候作业;
(4)信息量丰富,包括三维点云和影像信息
5.典型案例
- 和北京清华大学合作的国家973项目,红树林三维数据的采集
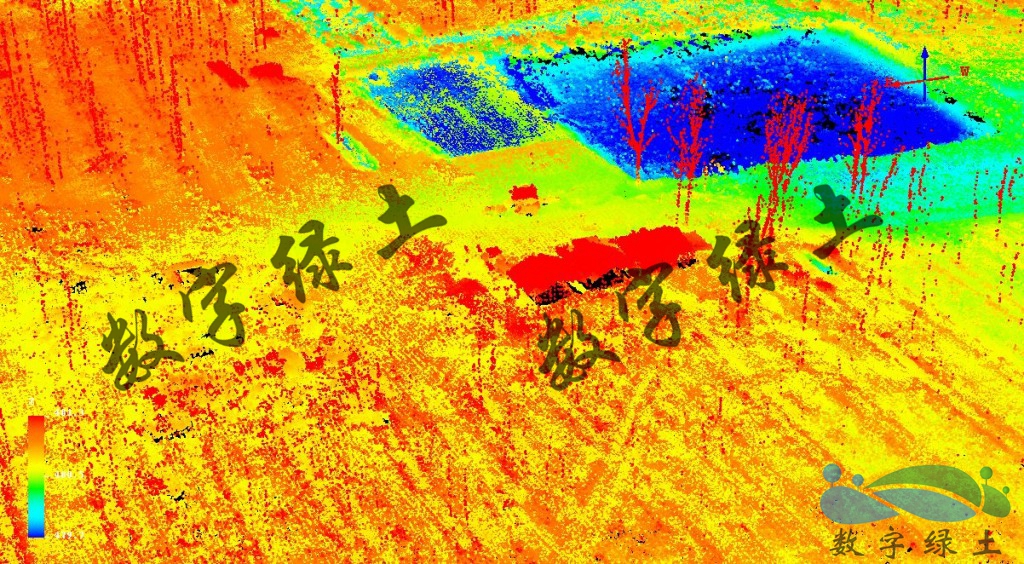
无人机激光雷达点云数据(冬天)