
1、Q:LiDAR360对计算机硬件和操作系统的要求是什么?
A: ● 内存(RAM):不小于8GB;
● 中央处理器(CPU):Intel Core i5/i7;双核处理器;
● 显示适配器:推荐NVIDIA独立显卡,显存不低于2GB;
● 操作系统:微软 Windows 7 (64位),微软 Windows 8 (64位),微软 Windows 10(64位)或Windows Server 2012及以上。
2、Q:为什么我的电脑上软件安装成功之后,打开数据时软件崩溃?
A:请检查软件安装环境是否满足推荐的硬件配置,如果满足,请检查:(1)显卡是否正常运行(右键单击我的电脑,选择设备管理器,在显示适配器中找到对应的显卡,查看显卡属性状态,如果显示“这个设备运转正常”则表示显卡设备正常运行);(2)将独立显卡驱动更新至最新,然后使用高性能图形模式运行软件,操作步骤见调整高性能图形模式。
如果仍然出现错误,请发邮件至info@lidar360.com联系技术人员,远程查看原因。
3、Q:为什么安装LiDAR360后,运行软件会提示试用license过期?
A:LiDAR360无法试用可能有以下几个方面的原因:
● 系统时间改变:LiDAR360在试用过程中,可能会遇到一些原因致使系统时间改变导致试用过期。
● 试用过期:LiDAR360每个版本试用期为7天,如果同一个版本之前安装超过7天后,导致试用过期。
● 其他原因:请发邮件至info@lidar360.com联系申请延长试用license。
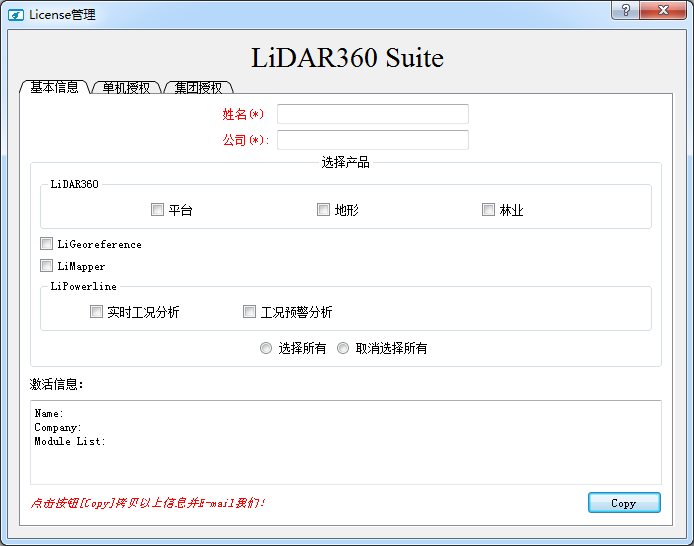
4、Q:LiDAR360如何发送激活信息?收到授权码之后如何激活?
- 激活信息发送:点击帮助 > 激活License 或双击安装目录下的License Manager.exe

- 输入姓名;
- 输入公司;
- 选择激活模块;
- 点击Copy;
- Ctrl+V将内容粘贴到邮件中,发送至info@lidar360.com。
- License激活:
- 复制邮件中的授权码到本地,激活方式可参考许可证管理器。
5、Q:LiDAR360支持Server系统么?如何使用?
A:目前LiDAR360仅支持Windows Server系统。
服务器系统使用说明如下: ● 使用管理员账户安装激活LiDAR360软件,且注意将软件安装在其他非管理员账户具备权限的文件夹中。
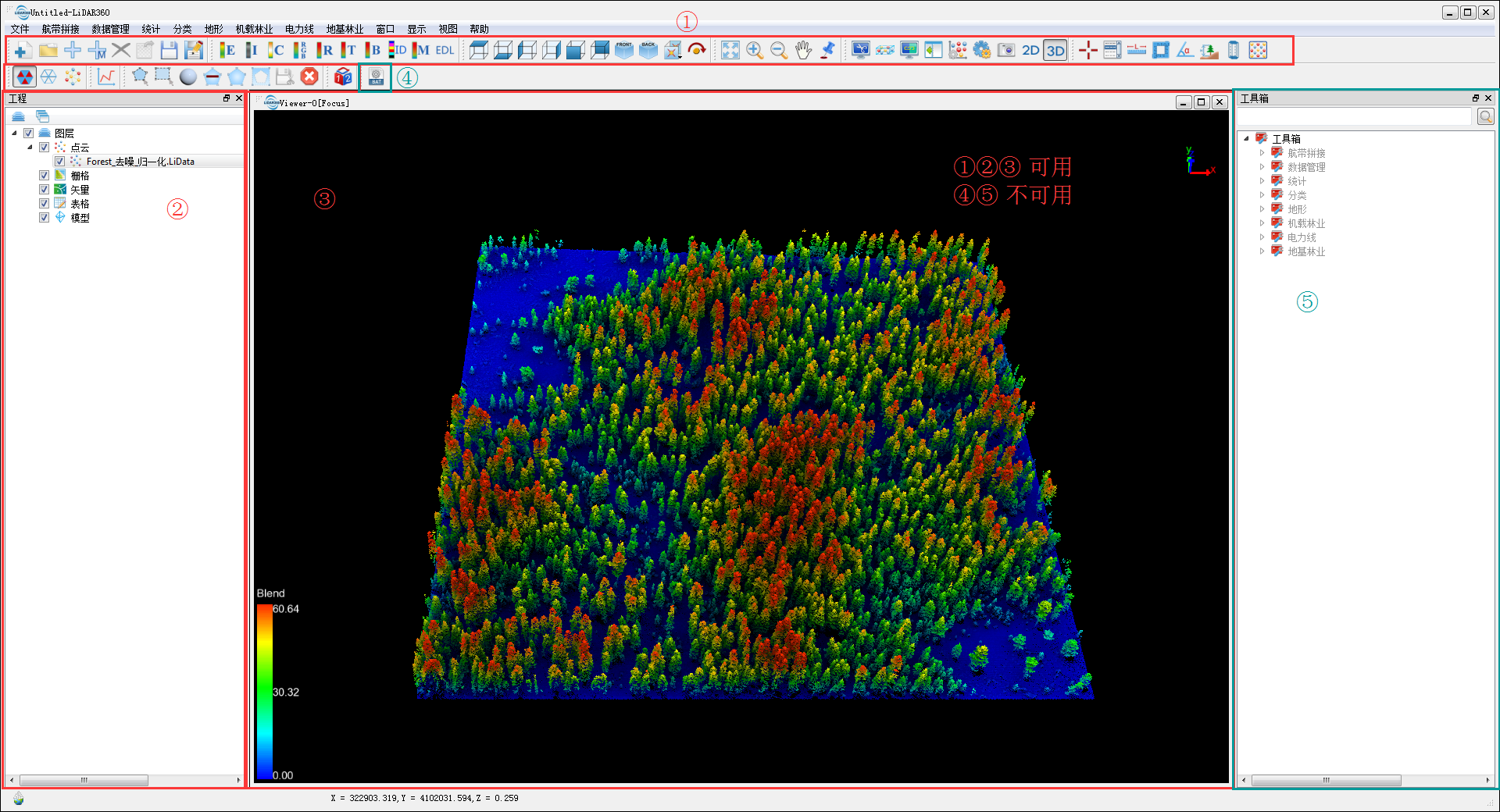
6、Q:LiDAR360试用过期后,还可使用哪些功能?
试用期结束后,LiDAR360软件的viewer工具(包括数据导入、点云显示、选择工具、量测工具等)能正常使用,其他功能需要激活才能使用。
7、Q: 为什么点击License管理界面的帮助按钮无法打开帮助手册?
A: 请设置打开pdf文档的默认程序。
8、Q: 如果电脑损坏,无法迁出授权码,如何在其他电脑上使用该授权码?
A: 请联系info@lidar360.com,我们将从后台回收该授权码,然后可以在其他电脑上使用该授权码。
9、Q:如何查看LiDAR360软件的版本信息?
A:点击菜单栏的帮助 -> 关于,可查看LiDAR360软件的版本信息,如下图,2.0为软件版本号,1019为编译日期。
10、Q:如何修改语言设置?
A:点击菜单栏的显示 -> 语言,可切换英语、中文和法语。
11、Q:软件为什么会异常退出?
A:软件异常退出时,请检查:(1)是否打开了屏幕取词软件(如:有道词典);(2)是否有足够的硬盘空间或者内存空间。
12、Q:LiDAR360支持的数据格式有哪些?
A: ● LiDAR360可导入的数据类型分为点云、栅格、矢量、表格和模型五大类,具体格式如下:
○ 点云:LiData文件(*.LiData 自定义点云格式)、LAS文件(*.las,*.laz)、ASCII文件(*.txt, *.asc, *.neu, *.xyz, *.pts, *.csv)、PLY文件(*.ply)。
○ 栅格:影像数据(*.tif,*.jpg)。
○ 矢量:矢量数据(*.shp)。
○ 表格:表格数据(*.csv)。
○ 模型:自定义模型文件(*.LiModel自定义模型文件,*.LiTin自定义三角网文件)、OSG模型(*.osgb, *.ive, *.desc, *.obj)。
● LiDAR360可导出的数据格式如下:
○ 点云:LiData文件(*.LiData 自定义点云格式)、LAS文件(*.las,*.laz)、ASCII文件(*.txt, *.asc, *.neu, *.xyz, *.pts, *.csv)、PLY文件(*.ply)。
○ 栅格:影像数据(*.tif, *.jpg, *.bmp)。
○ 矢量:矢量数据(*.shp,*.dxf)。
○ 表格:表格数据(*.csv)。
○ 模型:自定义模型文件(*.LiModel, *.LiTin)。
13、Q:LiDAR360数据窗口内颜色条显示不正确,如何设置?
A:在桌面上点击鼠标右键,选择NVIDIA Control Panel (NVIDIA 控制面板),选择管理3D设置 -> 程序设置 -> 添加,将LiDAR360软件添加到高性能图形模式列表中。
14、Q:为什么同一个窗口中添加多个数据时,EDL效果不明显?
A:相隔较远的数据建议单独拖到不同的窗口,进行EDL显示(或者在当前窗口中移除不相关的数据)。
15、Q:LiDAR360软件处理的点云数据单位是什么?
A:LiDAR360处理的点云数据单位为米。如果用户的点云单位为英尺或者其它,可通过 数据管理 -> 格式转换 -> 转换为LiData / 转换为Las 进行单位转换。
![]()
16、Q:LiDAR360能否处理影像生成的点云?
A:可以。
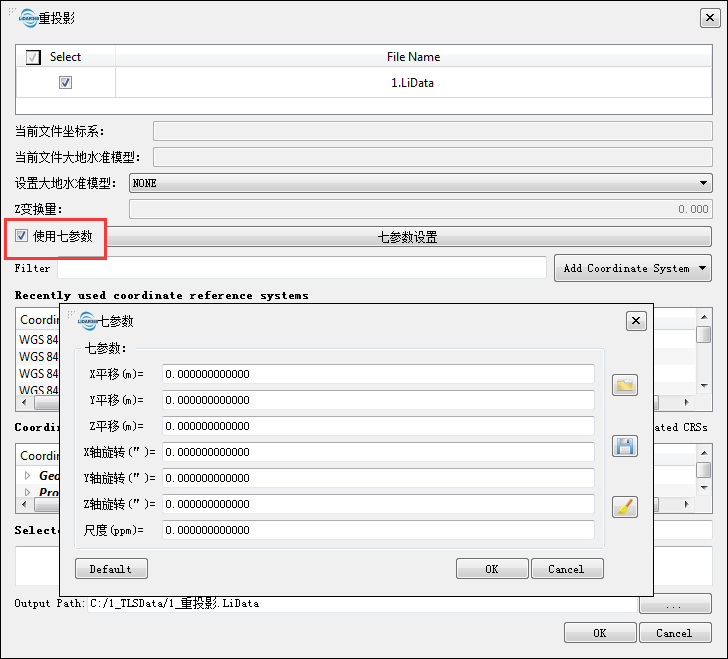
17、Q:LiDAR360如何进行七参数变换?
-
A:流程如下:点击数据管理 -> 投影和坐标转换 -> 重投影,输入七参数的值:Dx:X平移量,Dy:Y平移量,Dz:Z平移量,Rx:X旋转量,Ry:Y旋转量,Rz:Z旋转量,λ:尺度变化,选择目标坐标系(如果点云数据无投影信息,需要先定义投影)。
18、Q:如何对点云均匀抽稀?
A:LiDAR360提供了三种抽稀方式:最小点间距、百分比和八叉树,其中,按照八叉树的抽稀方式是均匀的(流程如下:数据管理 -> 点云工具 -> 重采样,采样类型选择Octree,并设置相应的分层数)。
19、Q:为什么用LiDAR360的3D仿射变换进行转换之后点云坐标不正确?
A:LiDAR360中Rx、Ry、Rz的单位为度,所以在变换之前需要先进行弧度和度的转化。(角度=180*弧度/π)
20、Q: 为什么几何校正之后的数据误差很大,如何解决?
A: 选择的同名点对残差较大,可以去掉残差大的点对。
21、Q: 使用多点选择工具时能否选择旋转中心?
A:可以。使用多点选择工具时,按住键盘上的Ctrl键,再通过鼠标左键选择旋转中心。
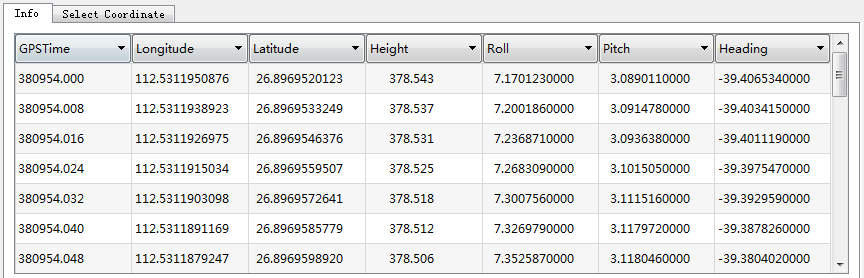
22、 Q:LiDAR360支持的POS数据格式有哪些?
A:LiDAR360支持文本文件格式(*.pos)和二进制格式(*.out)的POS数据。
● *.pos文件是一个包含GPS时间、经纬度、飞行高度、横滚角(Roll)、俯仰角(Pitch)和偏航角(Heading)的文本文件,如下图所示:
● *.out是Applanix公司自定义的二进制POS数据格式。
23、Q:LiDAR360中航带匹配是自动实现还是手动实现?
A:LiDAR360中包含自动航带匹配和手动航带匹配,并可以实时查看拼接结果,生成高精度点云。
24、Q:LiDAR360中POS数据的时间基准是什么?必须是GPS时间么?
A:LiDAR360中POS数据的时间和点云数据中的时间基准保持一致即可(如同为GPSTime或同为UTCTime),通常情况下,点云数据中的时间是以周秒或天秒等为基准,如果时间基准不同,需进行相应的转换。
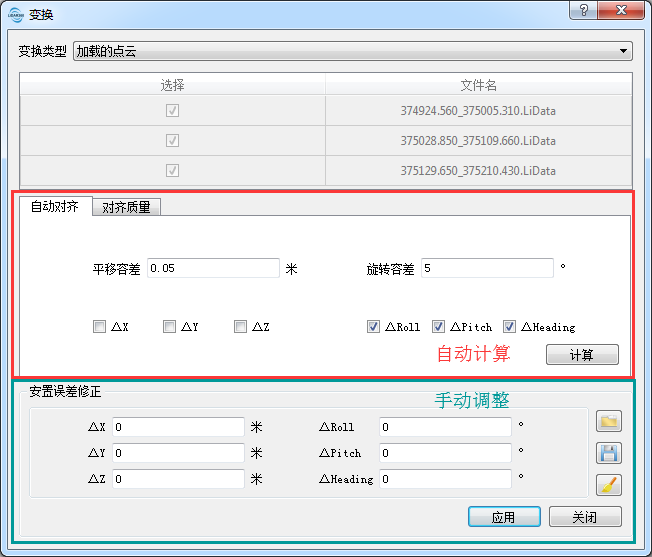
25、Q:为什么航带拼接之后有些数据的部分区域拼接效果很好,而有部分区域却无法拼接,甚至会有变形?
A:目前航带拼接模块主要是通过消除激光雷达和惯性测量单元之间的安置误差来实现航带之间的匹配,前提条件是航飞处理后的POS数据精度也需满足相应规范要求等,如果POS精度不能满足要求会导致点云数据局部有变形,单纯依赖安置误差校准无法满足航带拼接结果,一般该种情况存在于实时处理得到的精度不高的POS文件。
26、Q:为什么按POS数据裁剪点云没有生成结果?
A: 请检查pos数据的起止GPS时间和点云的GPS时间范围是否有重叠。
27、Q:LiDAR360 软件中采用的是什么滤波算法?
A:LiDAR360采用的是改进的渐进加密三角网滤波算法(Improved Progressive TIN Densification, IPTD),了解算法原理,可参考论文:Zhao et al(2016) Improved progressive TIN densification filtering algorithm for airborne lidar data in forested areas.
28、Q:实际采集的激光雷达点密度远大于生产对应的DEM的点密度要求,能否对数据进行抽稀处理?
A:若实际采集的激光雷达点密度远高于生产需求,可使用重采样功能实现数据抽稀,LiDAR360提供了三种抽稀方式:最小点间距、百分比和八叉树。
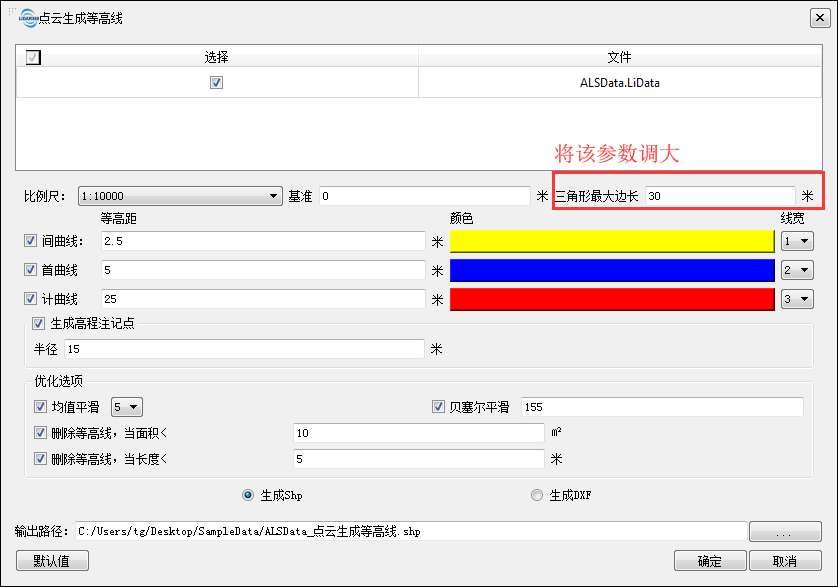
29、Q:LiDAR360中点云生成等高线的功能,生成的等高线为什么有中断现象?
A:等高线有中断的地方是由于缺少地面点导致的,通过将界面上的参数“三角形最大边长(米)”调大(如:将30米调整为50米)可使等高线连续。
30、Q:对于已生成的DEM数据,如何在LiDAR360软件中更直观地检查DEM的生成质量及对质量不合格区域进行修改?
A:首先可以通过地形模块中的山体阴影工具生成山体阴影图,此工具通过设置栅格中的每个像元确定照明度增强表面的可视化。同时可以利用数据管理 -> 格式转换 -> TIFF转换为LiModel对单波段的Tiff影像转换为LiModel,LiModel模型可以三维模式下查看,更加直观。另外对于LiModel模型可以通过地形 -> LiModel编辑对模型进行编辑,如高程置平,高程平滑,去除钉状点等操作,从而生成质量更佳的DEM模型。同样地,对于DSM,CHM的Tiff数据也可以进行以上操作。
31、Q:如何选择生成DSM的插值方式?
A:对于林区,推荐采用IDW插值生成DSM;对于城区,推荐采用spike-free TIN生成DSM。
@inproceedings{
author={Zhao X Q, Guo Q H, Su Y J and Xue B L},
title={Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas},
booktitle={ISPRS Journal of Photogrammetry and Remote Sensing,117:79-91},
year={2016}
}
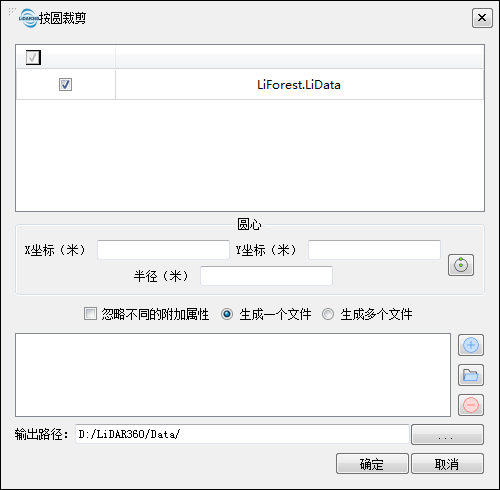
32、Q:按圆心和半径裁剪点云数据时,是否能将每个样地保存成单独的文件?
A:LiDAR360 1.4版本之后支持将按圆裁剪和按矩形裁剪的结果保存为单个文件或者合并为一个文件。
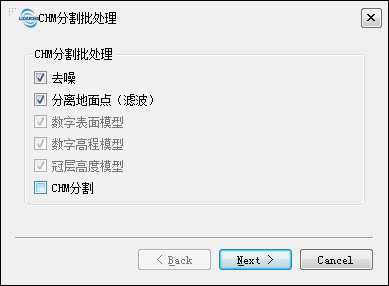
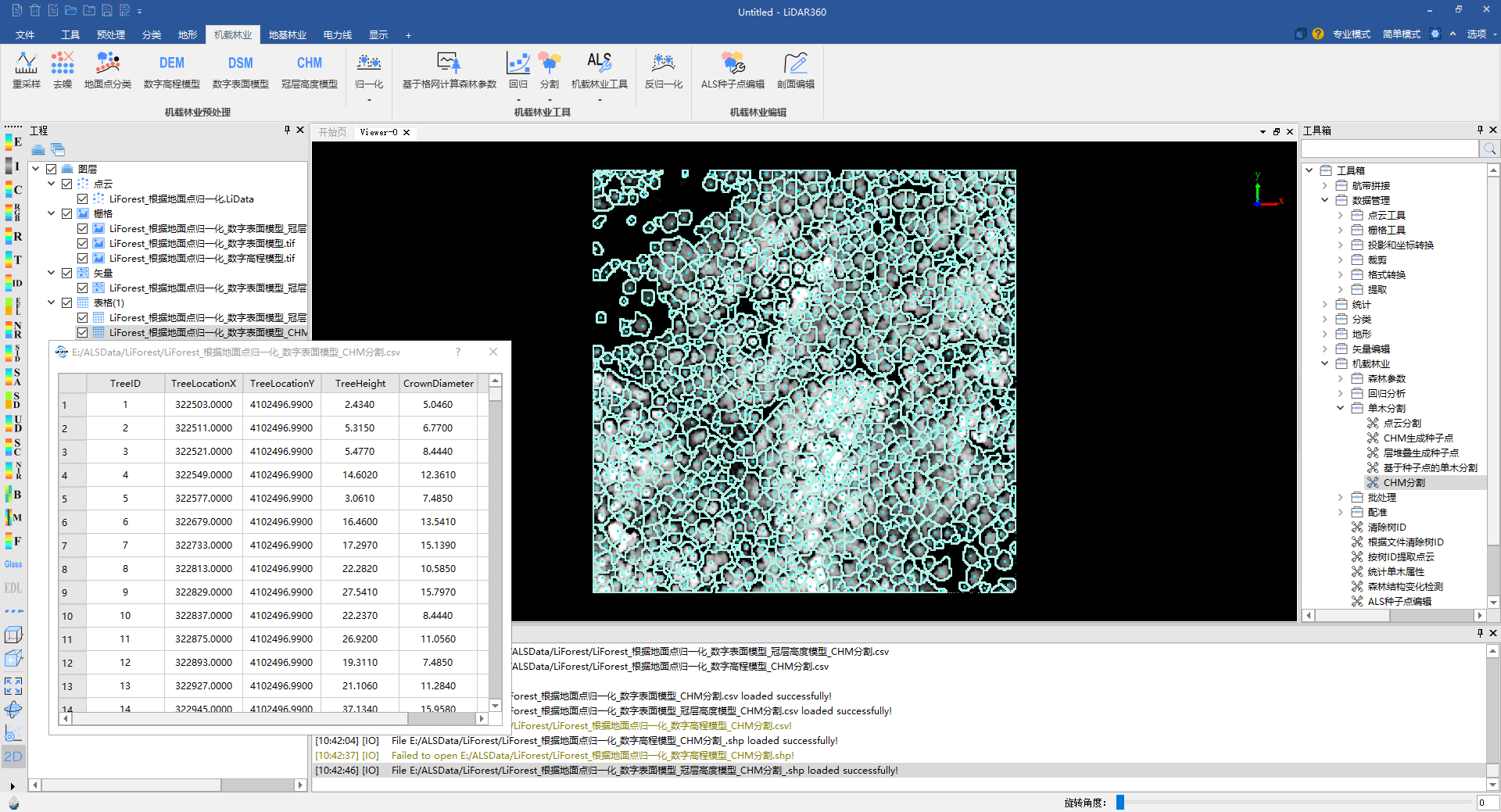
33、Q:LiDAR360能否批量生成CHM?
A:LiDAR360可以批量生成CHM(流程如下:机载林业 -> 批处理 -> CHM分割批处理)。
34、Q:单木分割结果如何进行精度评估?
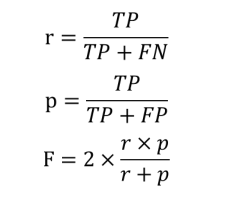
A:单木分割精度评估可参考Li等人(Li et al.,2012)的文章,通过与实测值比较,分别记录分割得到的树木总数、正确分割的棵数、错误分割的棵数、漏分的棵数,按照下面的公式分别计算recall(r)、precision(p)和F-score(F)的值。Recall表示树木的检测率,precision表示树分割的正确率,F-score为综合考虑错分和漏分的总体精度,三者的变化范围均在0-1之间。
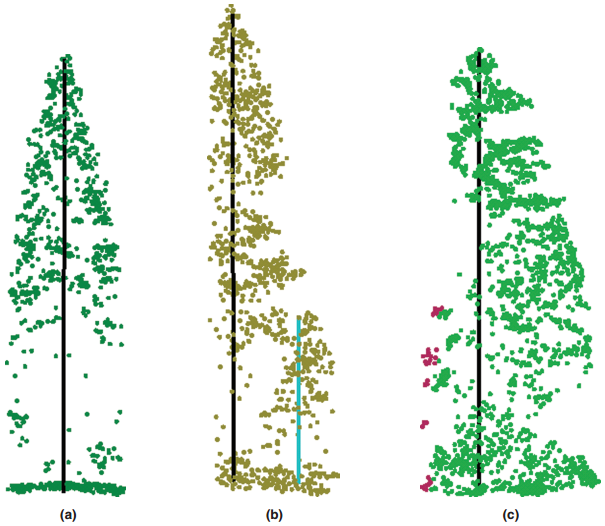
(a)树木被正确分割(True Positive, TP)(b)树木未被检测(False Negative, FN) (c)错误检测(False Positive,
FP)
35、Q:CHM分割精度受哪些参数影响,应该如何设置这些参数?
A:CHM分割的精度受CHM分辨率和高斯平滑因子的影响。CHM为DSM和DEM的差值,其分辨率由DSM和DEM的分辨率决定,一般而言,该值不宜超过冠幅的三分之一,可设置范围为0.3-1米,通常情况下,分辨率设置为0.5-0.6米能得到较高的分割精度。Sigma为高斯平滑因子(默认为“1”),该值越大,平滑程度越高,反之越低。平滑程度影响分割出的树木株数,如果出现欠分割,建议将该值调小(如:0.5),反之,如果出现过分割,建议将该值调大(如:1.5)。
36、Q:CHM分割后,如何去除一些冠幅面积较小的结果?
A:CHM分割后可得到一个包含树木边界的shp文件,属性表中包含每棵树的ID、中心位置坐标、树高、冠幅直径和冠幅面积,可将该数据导入第三方软件(如:ArcGIS),根据冠幅面积属性进行过滤,删除冠幅面积较小的分割结果。
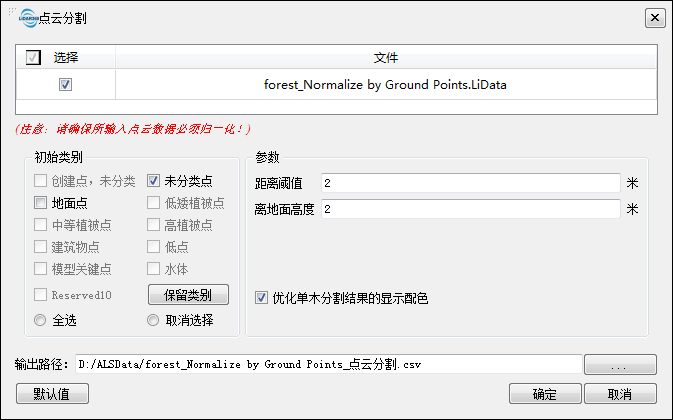
37、Q:如何让2m以下的点云数据参与分割?
A:点云分割界面上的参数“离地面高度”表示的是低于该值的点被认为不是树的一部分,在分割过程中将被忽略,该值默认为2m,若需要让2m以下的点云参与分割,可将该值适当调小。
38、Q:针阔混交林数据采用哪种分割方式能得到较高的精度?
A:对于针阔混交林,建议采用CHM分割。
39、Q:树木长势不一样,如何分割能得到较高的精度?
A:对于长势差距较大的数据,建议通过选择工具或者裁剪工具将不同长势的点云保存为不同的文件,单独予以处理。
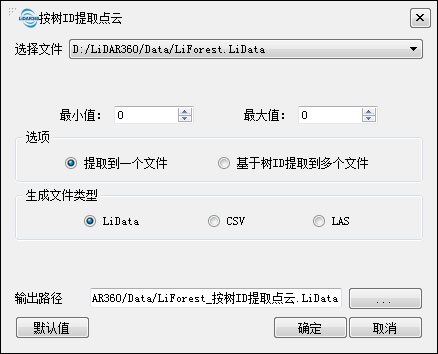
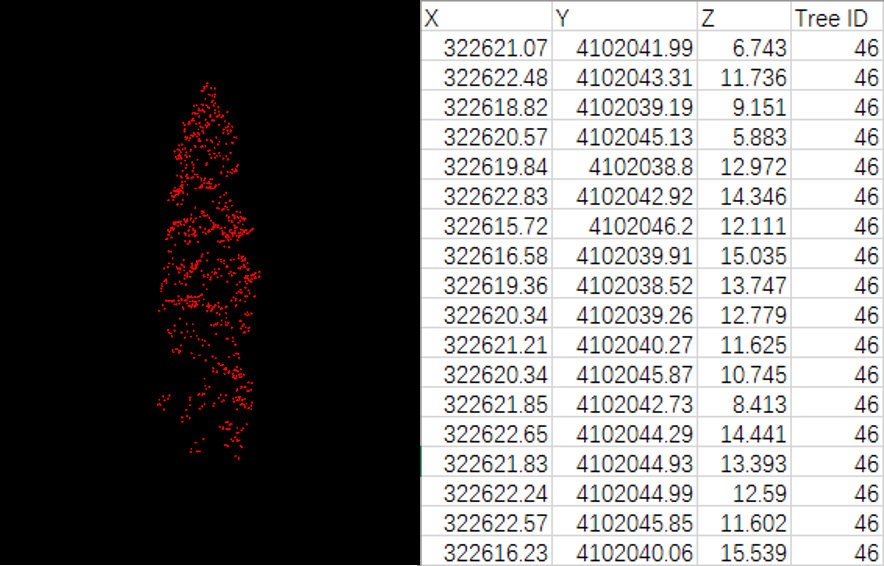
40、Q:LiDAR360的单木分割结果如何导出到第三方软件进行分析?
点击机载林业 > 按树ID提取点云,可以将分割过的点云导出为Lidata、CSV和LAS格式,利用其它软件进行后续分析。软件支持将每棵树导出为单独的CSV文件,也可以将所有点导出为一个文件。导出的CSV文件如下图所示,其中包含X、Y、Z坐标和树ID信息。
41、Q:回归分析至少需要多少个样地调查数据?
A:用于回归分析的样地数量一般没有明确的规定。一般而言,在保证样地位置和样地测量准确性的前提下,样地的数量越多,回归分析的精度越高。样地应随机选择且具有代表性,能够覆盖研究区内不同的林型。样本量小于30个被称为小样本,样本量大于等于30个被称为大样本,为了保证回归精度分析,推荐样本数量应该大于等于30个(还要考虑研究区大小及复杂情况等),样本个数应当大于回归自变量个数
42、Q:如何选择参与回归分析的自变量?
A:参与回归分析的变量一般选择从激光雷达数据获取的高度百分位变量,但是不同的研究区、不同的参数变量,具体的高度百分位参数变量的选择也不尽相同,没有通用性。
43、Q:能否将LiDAR360软件的自变量(如:高度百分位数)导入第三方软件(如:SPSS、R)进行回归分析?
A:可以。LiDAR360软件提供的自变量包括高度分位数、垂直方向密度、强度分位数、有效叶面积指数、间隙率和郁闭度,其中,高度分位数、垂直方向密度和强度分位数为CSV格式,可直接导入到SPSS等第三方软件使用。叶面积指数、间隙率和郁闭度为TIF格式,可先通过ArcGIS转成文本格式,再导入第三方软件。
@inproceedings{
author={ Li W K, Guo Q H, Jakubowski M K and Kelly M},
title={A new method for segmentation individual trees from the LiDAR point cloud},
booktitle={ Photogrammetric Engineering and Remote Sensing,78(1):75-84},
year={2012}
}