
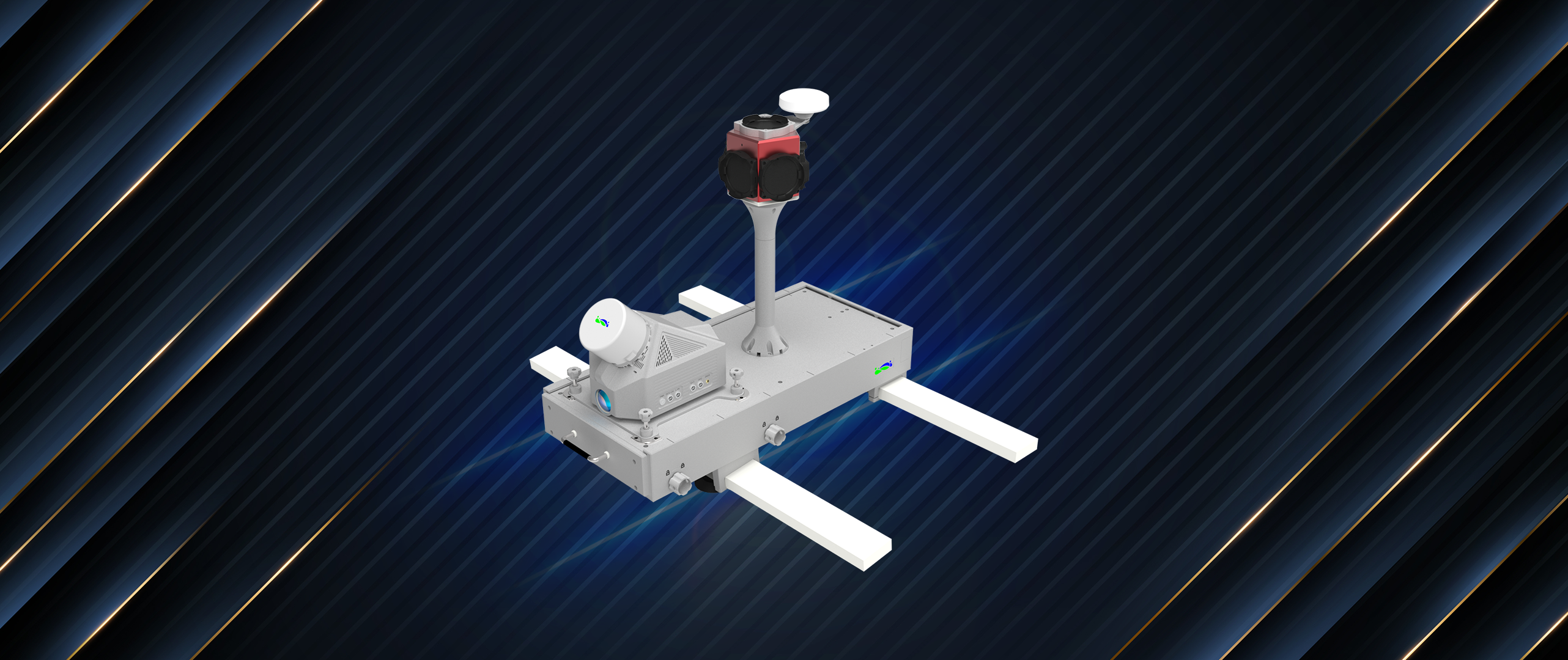
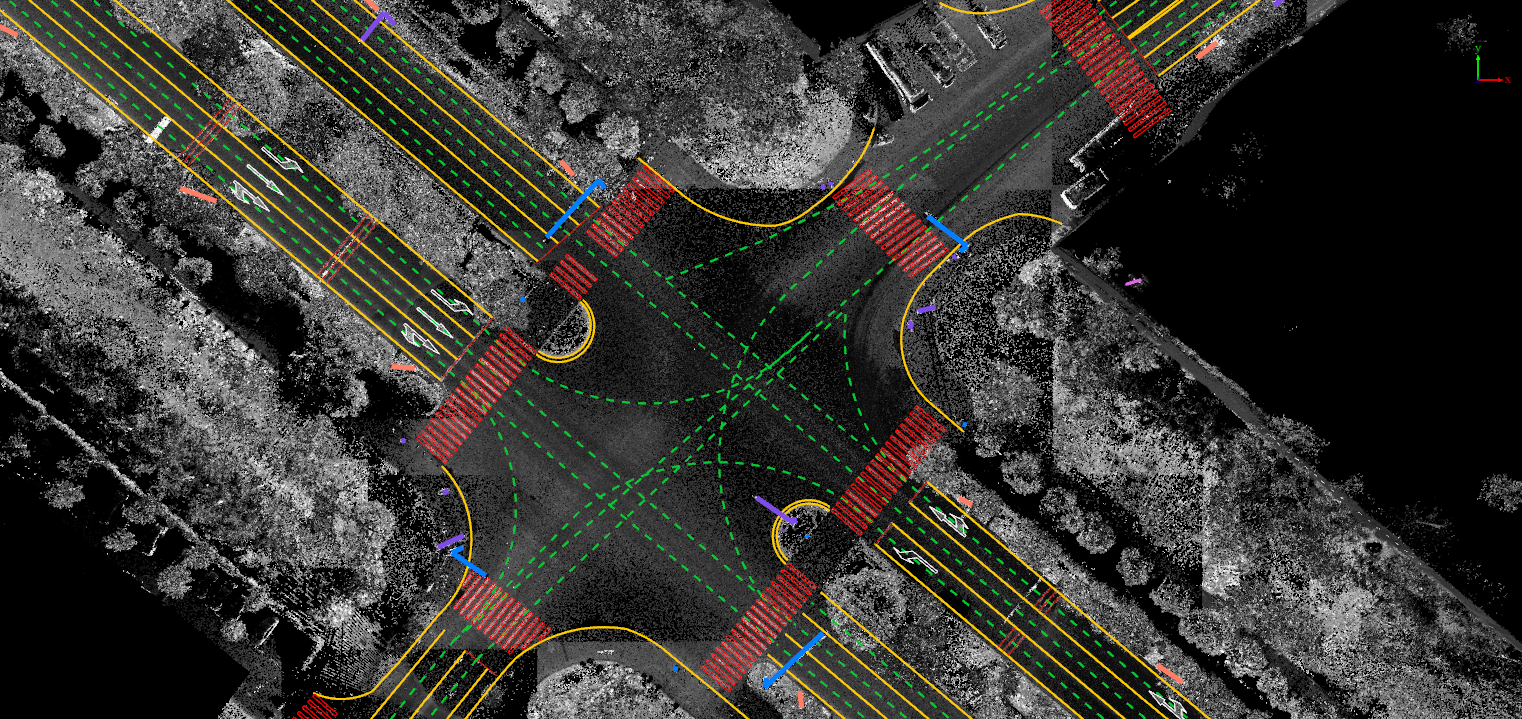
LiMobile M1 移动激光扫描系统搭配倾斜 45 度安置的激光雷达、高分辨率相机和 Ladybug5+ 全景相机,可快速获取道路及周围地物的三维数据;同时预留丰富的扩展接口,支持选配车轮编码器;支持 2 TB 可插拔硬盘,便于大数据量的存储和拷贝;一体化的车载支架设计,可安装在不同车型上使用;搭配数字绿土自研的 LiDAR360 MLS 软件可实现一站式数据处理到行业成果交付。
产品优势
- 轻量化:轻量化紧凑设计,极大缩减设备内部空间,一体化设备重量仅12.68 kg,安装和运输方便、快捷。
- 多传感器:集成多线激光器、GNSS/INS 组合导航系统和高分辨率相机等多源传感器,可获取高清点云数据和影像数据。
- 实时监控:可实时在 web 界面中显示采集的数据、监测设备运行状态。
- 丰富拓展:可插拔存储硬盘、DMI、USB 3.0、LAN。
- 持续作业:热插拔电池设计,持续稳定电源供应。
- 多行业应用:广泛应用于道路资产普查、城市电力普查、城市园林绿化、智慧交通等领域。
| 系统参数 | |||||
| 尺寸 | 645×289×571mm | 电池 | 5875 mAh×5 | 存储 | 512 GB SSD + 2 TB 可插拔硬盘 |
| 重量 | 12.68 kg | 工作时间 | ≥ 4 h | 端口 | HDMI, USB, ODO, LAN |
| 适用环境 | 室外 | 系统控制及数据显示 | 无线模式 | 平板电脑通过连接设备的 WIFI,进行作业控制及数据同步显示 | |
| 处理器 | 四核八线程 | 有线模式 | 平板电脑通过数据线连接设备,进行数据传输与控制 | ||
| 广角相机参数 | |
| 像素 | 890 W |
| 传感器类型 | CMOS |
| 最大帧率 | 13 FPS |
| 传感器尺寸 | 1 英寸 |
| 分辨率 | 4096×2160 |
| 功耗 | 3.8 W |
| Ladybug5+全景相机参数 | |
| 像素 | 3000 W |
| 传感器类型 | CMOS |
| 最大帧率 | 30 FPS (JPEG 压缩 ) |
| 传感器尺寸 | 2/3 英寸 |
| 分辨率 | 8192×4096 |
| 功耗 | 13 W |
| 数据成果 | |
| 相对精度 | ≤ 3 cm[1] |
| 绝对精度 | ≤ 5 cm[2] |
| 点云格式 | LAS, LAZ, LiData |
| 激光雷达参数 | |
| LiDAR传感器 | XT32 |
| LiDAR 精度 | ±1cm |
| 垂直视场角 | 31° (-16° ~ +15° ) |
| 水平视场角 | 360° |
| 量程 | 0.05 ~ 120 m |
| 点频 | 640,000 点 / 秒 (单回波) 1,280,000 点 / 秒 ( 双回波) |
| 位置与姿态参数 | |
| GNSS 系统 | GPS; GLONASS; Galileo;BEIDOU;QZSS; SBAS |
| IMU 更新频率 | 100 Hz |
| 定位准确度(RMS 1ơ) | 水平 0.01 m 横滚角 / 俯仰准确度 (RMS 1ơ) 0.03 ° 垂直 0.025 m 航向准确度 (RMS 1ơ) < 0.08° |
| 软件 | |
| 预处理软件 | LiGeoreference/ LiDAR360MLS-Geo 模块 |
| 后处理软件 | LiDAR360MLS ( 选配 ) |