CSF地面点滤波
功能概述
地面点分类是点云数据处理的基础操作,此功能采用基于布料模拟的地面点滤波算法(Cloth Simulation Filter, IPTD(Zhang et al.,2016))。
此算法可以分为以下几个步骤:
- 将点云Z方向倒置。并在XY方向上以一定分辨率对点云进行格网划分,格网的节点作为一张模拟布料。
- 将布料的初始高度设为点云Z最大值并开始迭代。每次迭代过程中,布料将以一定的重力“下沉”到点云上,同时计算布料节点和点云的位置关系。已经落到点云上的节点在下次迭代过程中将不可移动。不可移动的节点将根据刚度值r使周围节点的下沉速度减缓。
- 迭代一定次数后,计算各个点和布料的位置关系;与布料在Z方向上距离小于一定阈值的点将被分为目标类别。
用法
点击分类 > CSF滤波。
参数设置
- 输入数据:输入文件可以是单个点云数据文件,也可以是点云数据集;待处理数据必须在LiDAR360软件中打开。
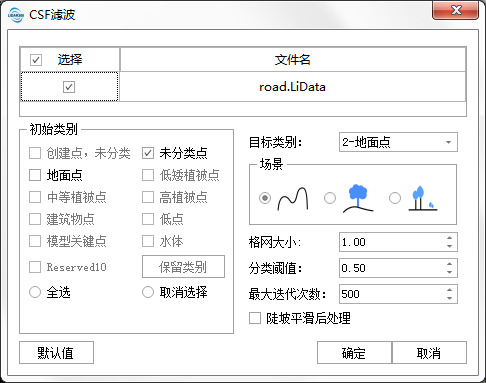
- 初始类别:待分类类别。
- 目标类别:分类目标类别。
- 场景:分为陡坡、缓坡和平地三种场景类型。
- 格网大小(米)(默认为“1.0”):布料节点的分辨率。1.0适用于大多数点云。对于地形起伏较大的数据可适当减小该值。
- 分类阈值(米)(默认为“0.5”):迭代完成后,与布料在Z方向上距离小于此阈值的点将被分为目标类别。
- 最大迭代次数(默认为“500”):算法到达最大迭代次数或所有布料节点都不可移动时完成迭代。
- 陡坡平滑后处理:布料位于陡坡上时,由于布料节点之间存在内部约束,不能很好地与地面相吻合,算法可能会产生较大误差。勾选此项可以在一定程度上消除陡坡带来的影响。若场景中不含陡坡可以不勾选。
@inproceedings{
author={Zhang W, Qi J, Wan P, Wang H, Xie D, Wang X, Yan G},
title={An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation.},
booktitle={Remote Sensing. 8(6):501.},
year={2016}
}