三角网建模
功能概述
利用点云进行三维建模,并生成.obj格式的三维模型文件。
用法
点击 矿山 >巷道 > 三角网建模。
参数设置
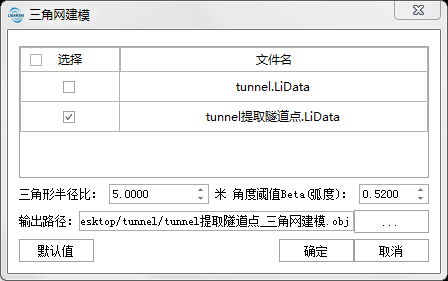
- 输入点云数据:输入一个或多个点云数据文件。文件格式:*.LiData。
- 三角形半径比(默认为“5.0”): 三角网重建过程中,候选三角形的半径与边界三角形半径的比值。算法将沿着点云的表面探测候选三角形,当点云出现缺失时,候选三角形的半径将会变大,也容易变得尖锐。此值用于控制是否将这些三角形作为候选。此值越大,所生成的模型孔洞越少,尖锐的三角形越多。
- 角度阈值Beta(弧度)(默认为0.52):三角网重建过程中的边界处的三角形与候选三角形的最小夹角阈值。此值越大,重建出的三角网模型越平滑,但算法更容易在点云形态变化剧烈处终止。此值推荐设置为0.1~1.5之间。